




Le MCU in tempo reale C2000 sono utili per sviluppare progetti di controllo dell'alimentazione di motori EV ad alta efficienza energetica ed economicamente vantaggiosi
La rapida crescita dei requisiti tecnici dell'elettronica di potenza dei moderni veicoli elettrici (EV) e ibridi (HEV) pone sempre più i progettisti di fronte a un compito quasi insormontabile. L'aumento dell'efficienza energetica e della densità di potenza dei sistemi di propulsione e di conversione dell'energia richiede un'elettronica di controllo più complessa che incorpora l'efficiente tecnologia del nitruro di gallio (GaN) e del carburo di silicio (SiC) che opera ad alte frequenze di commutazione. Oltre alla sicurezza funzionale, i veicoli connessi funzionano anche in base a requisiti di sicurezza di livello IT e applicano interventi di sistema come gli aggiornamenti firmware via etere (FOTA).
Di fronte a budget di sviluppo compressi e ai prezzi competitivi dei prodotti finali, i progettisti dell'elettronica di potenza devono trovare il modo di semplificare la progettazione dei sistemi, anche attraverso l'impiego di soluzioni di controllo più integrate.
Per rispondere a queste sfide, questo articolo illustra alcuni dei vantaggi offerti dai microcontroller (MCU) in tempo reale conformi alle norme automotive serie C2000 di Texas Instruments, adatti ai controlli di motori e ai convertitori di potenza nei veicoli elettrici e nei veicoli ad alta velocità. Dopo una breve panoramica funzionale e dell'interfaccia della famiglia di controller F28003x, l'articolo presenta l'implementazione del controllo a orientamento di campo (FOC) nell'inverter di trazione e del controllo di corrente isteretico nei caricatori di bordo.
Maggiore efficienza per i motori controllati e i convertitori di potenza
Le grandi prestazioni degli attuali veicoli elettrici e HEV sono in gran parte dovute al controllo elettronico dei motori e dei convertitori di potenza. Le MCU in tempo reale utilizzate in questi sottosistemi utilizzano algoritmi di controllo complessi e modelli di motore accurati per rispondere in modo estremamente rapido, con un ritardo di controllo nell'ordine di pochi microsecondi. Se il controllo in tempo reale ad anello chiuso è troppo lento e non rispetta il lasso temporale definito, la stabilità, la precisione e l'efficienza dell'anello di controllo si riducono.
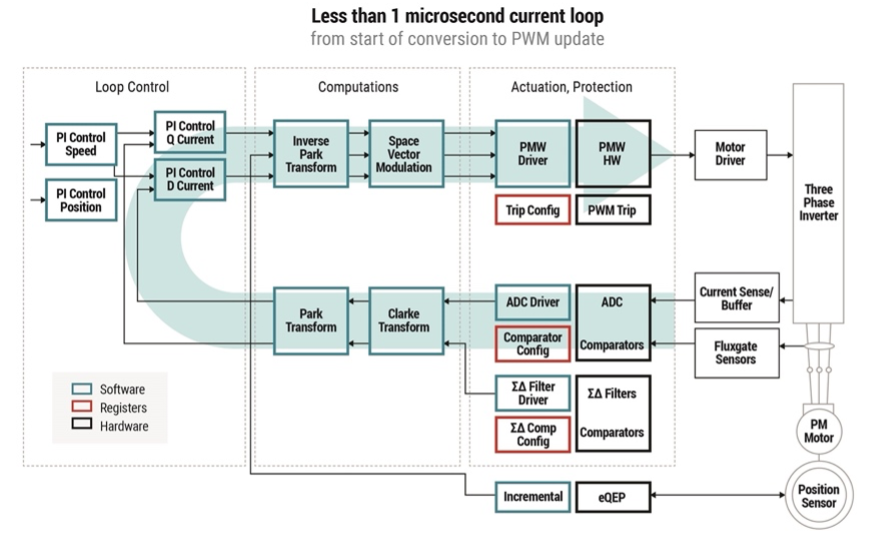
Per consentire l'uso di controller proporzionali, integrali, derivativi (PID) da librerie standard, i controller vettoriali trasformano il sistema di corrente dello statore trifase in un vettore dello spazio di corrente bidimensionale per controllare la densità di flusso magnetico e la coppia del rotore. Un circuito di corrente veloce (freccia blu nella Figura 1) dovrebbe portare a un ritardo di controllo inferiore a 1 µs.
Combinando il controllo vettoriale veloce come il FOC e un motore sincrono a riluttanza a magneti permanenti (IPM-SynRM) ad alta efficienza, i driver per motori raggiungono coppie elevate e un'efficienza fino al 96% rispetto al classico motore a corrente continua (cioè il motore sincrono a magneti permanenti, o PMSM). I progettisti possono implementare il controllo della coppia variabile tra la forza di Lorentz e la forza di riluttanza dell'IPM-SynRM utilizzando una MCU in tempo reale serie C2000 e il software C2000WARE-MOTORCONTROL-SDK in modo efficiente in termini di tempo e costi. Il FOC consente inoltre di controllare i SynRM con elevata precisione, anche senza magneti o sensori di posizione, risparmiando sui costi e sul peso del sistema e rendendo il motore più resistente al sovraccarico.
Per i convertitori di potenza c.a./c.c. che fungono da caricatori di bordo per veicoli elettrici (OBC) o da inverter fotovoltaici, è importante assicurare che la rete elettrica sia esente da distorsioni armoniche. Questa commutazione a tensione zero (ZVS) non pulita può essere contrastata con un controllo isteretico ibrido (HHC) della corrente. Gli sviluppatori possono anche affidarsi alle MCU C2000 per accelerare la progettazione dei circuiti applicando gli algoritmi di controllo ad alte prestazioni del repository software C2000WARE-DIGITALPOWER-SDK.
Semplificare la progettazione di motori EV con le MCU C2000
Per semplificare la progettazione dei sistemi di alimentazione, Texas Instruments offre le MCU in tempo reale serie C2000 per la rapida implementazione di complessi controlli di alimentazione, facilitando la creazione di diversi controlli flessibili grazie a un ambiente di sviluppo hardware e software completo. Una singola MCU C2000 consente ai progettisti di veicoli di implementare gruppi propulsori EV più piccoli e più convenienti a costi dimezzati, perché è progettata per gestire contemporaneamente caricatori di bordo, convertitori c.c./c.c. e inverter di trazione. Sono ipotizzabili anche applicazioni come HVAC, sistemi di assistenza alla guida e il controllo delle celle a combustibile.
I progettisti di sistemi possono utilizzare un'unica potente MCU per controllare più componenti elettronici di potenza e di sistema distribuiti nel veicolo. Il sito web di TI, in particolare Resource Explorer e C2000 Academy, offre ai progettisti molte opzioni di supporto sotto forma di schede tecniche, note applicative, schede di valutazione, progetti di riferimento, video di formazione e un forum di sviluppatori.
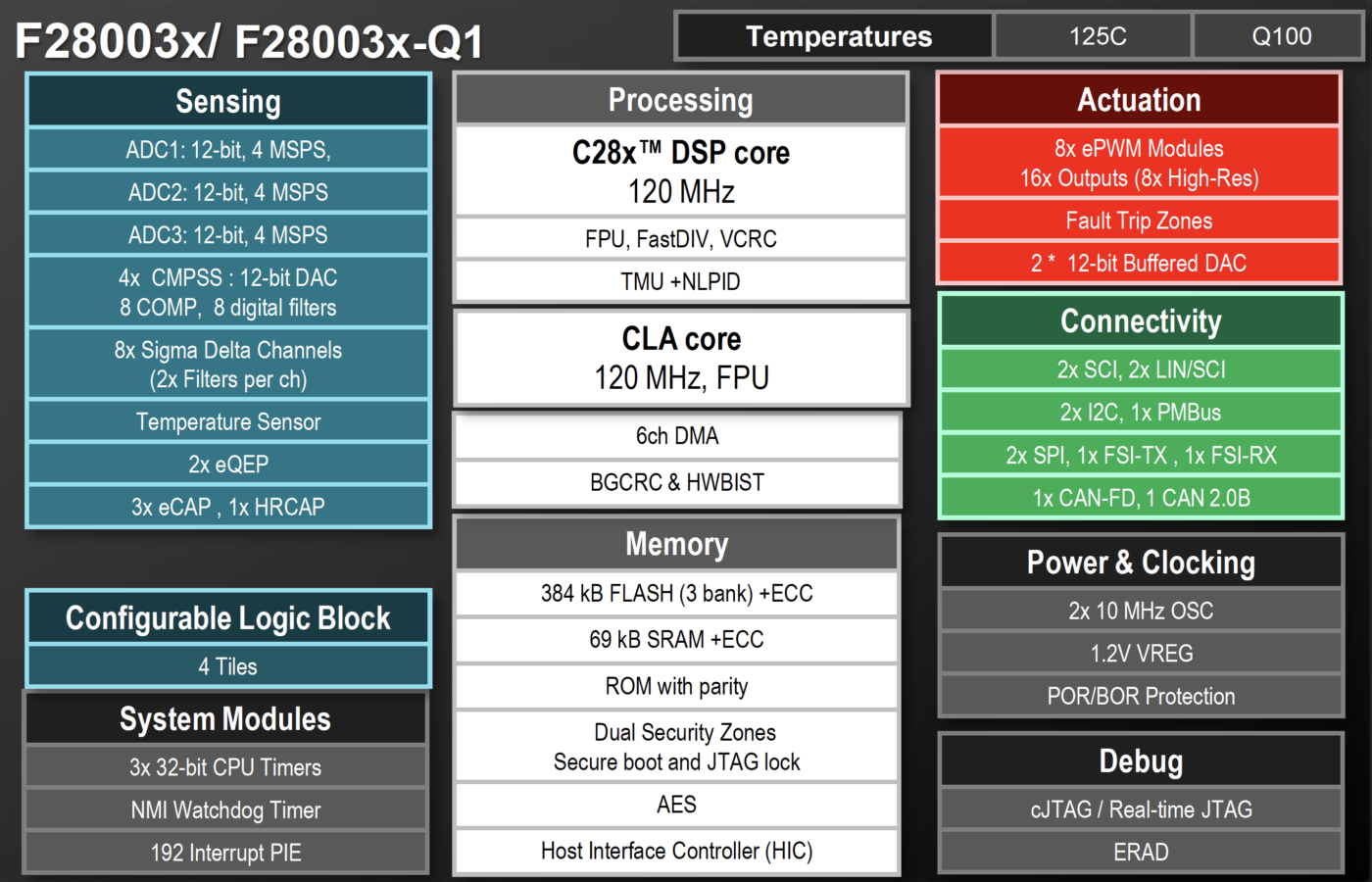
TI ha ottimizzato le prestazioni, l'integrazione e i costi della famiglia di controller in tempo reale F28003x specificatamente per l'uso nei veicoli elettrici. Grazie alla potenza elaborativa di 240 MIPS e alle periferiche di controllo in tempo reale integrate, i progettisti di circuiti possono migliorare la precisione e l'efficienza energetica dei loro sistemi di controllo motore e di conversione di potenza basati su una MCU F280039CSPZ, senza la necessità di un FPGA. Inoltre, la tecnologia GaN e SiC, di facile implementazione, riduce le perdite di commutazione e aumenta la densità di potenza grazie a frequenze di commutazione più elevate, componenti magnetici più piccoli e un'area di raffreddamento ridotta.
La serie F28003x supporta le comunicazioni Controller Area Network Full Duplex (CAN FD) e diverse interfacce seriali veloci. Una memoria flash integrata di 384 kB offre ampie riserve per la realizzazione di funzioni Internet delle cose (IoT]) collegate in rete. Le funzioni di sicurezza su chip, come Secure Boot, il motore di crittografia AES, il blocco JTAG e l'autotest hardware incorporato (HWBIST), assicurano che gli interventi sul sistema collegato in rete, come gli aggiornamenti firmware in tempo reale e firmware via etere (FOTA), siano protetti contro le manomissioni. Le MCU soddisfano i requisiti ASIL B e sono dotate di sicurezza funzionale integrata, accelerando i tempi di sviluppo delle applicazioni e la certificazione necessaria per il lancio sul mercato. La Figura 2 fornisce una panoramica delle funzioni e delle interfacce essenziali.
Ideale per i test e la prototipazione, la scheda TMDSCNCD280039C è una scheda di valutazione adatta per F280039C. Per il funzionamento di questa scheda di controllo dotata di una basetta HSEC180 (connettore ad alta velocità a 180 pin), è necessaria una docking station TMDSHSECDOCK a 180 pin.
Blocchi logici configurabili (CLB) per la logica personalizzata
Gli innovativi blocchi logici configurabili (CLB) consentono ai programmatori di integrare la logica personalizzata nel sistema di controllo in tempo reale C2000, eliminando la logica esterna, gli FPGA, i CPLD o gli ASIC. Aggiungendo un CLB, i moduli periferici C2000 esistenti, come il modulatore della larghezza di impulso potenziato (ePWM), l'acquisizione potenziata (eCAP) o l'encoder a impulsi in quadratura potenziato (eQEP), possono essere ampliati con segnali e funzioni specifici del cliente.
I blocchi logici sono configurati tramite C2000 SysConfig, disponibile come parte di C2000Ware. Richiede lo strumento SysConfig, che fa parte dell'ambiente di sviluppo integrato (IDE) Code Composer Studio (CCS) di TI o è disponibile come strumento autonomo da utilizzare con altri IDE (Figura 3).
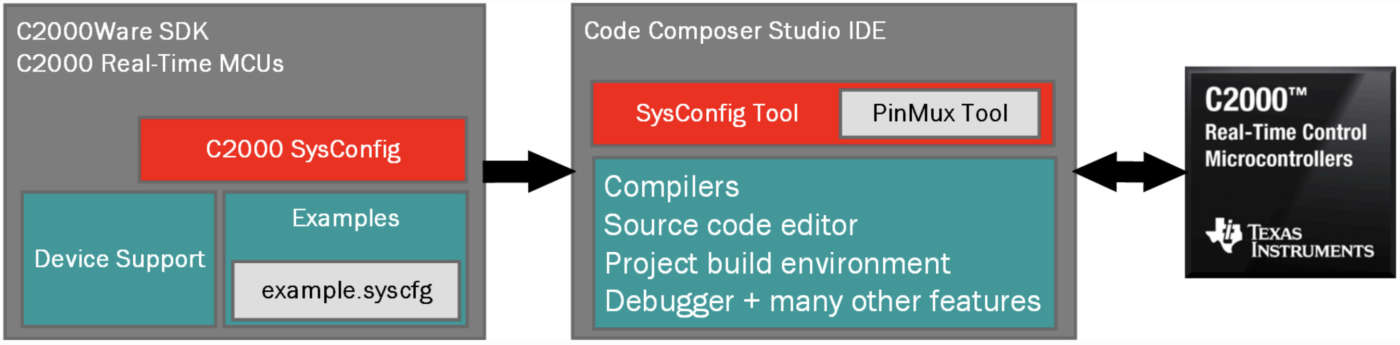
Il pacchetto software e la documentazione C2000Ware riducono al minimo i tempi di sviluppo fornendo driver, librerie ed esempi applicativi specifici per il dispositivo, oltre a estendere i dispositivi periferici utilizzando i CLB.
La base per lo sviluppo e il debug del codice delle applicazioni integrate C2000 è l'IDE CCS. La collezione di strumenti comprende un compilatore C/C++ ottimizzato, un editor di codice sorgente, un ambiente di creazione del progetto, un debugger, un profiler e molte altre funzioni. L'IDE intuitivo offre un'unica interfaccia utente che guida gli utenti in ogni fase dello sviluppo dell'applicazione. Gli strumenti e le interfacce familiari basati sul framework software Eclipse aiutano gli utenti a muovere rapidamente i primi passi.
Clock e test
Anziché intervenire nella complessa periferia del clock utilizzando i CLB, i programmatori possono utilizzare Embedded Pattern Generator (EPG) per semplici scenari di test durante la programmazione o la convalida. Il modulo EPG standalone facilita la generazione di schemi di impulsi personalizzati (SIGGEN) e di segnali di clock (CLOCKGEN), ma può anche acquisire e rimodellare un flusso di dati seriali in ingresso o sincronizzarsi con i segnali di clock generati.
Per il debug e il monitoraggio e la profilazione dei bus critici della CPU e degli eventi dei dispositivi in modo non intrusivo in un sistema in tempo reale C2000 si utilizza Embedded Real-Time Analysis & Diagnostics (ERAD). Il modulo hardware offre comparatori di bus estesi e contatori di eventi di sistema presenti all'interno dell'architettura del bus MCU (Figura 4).
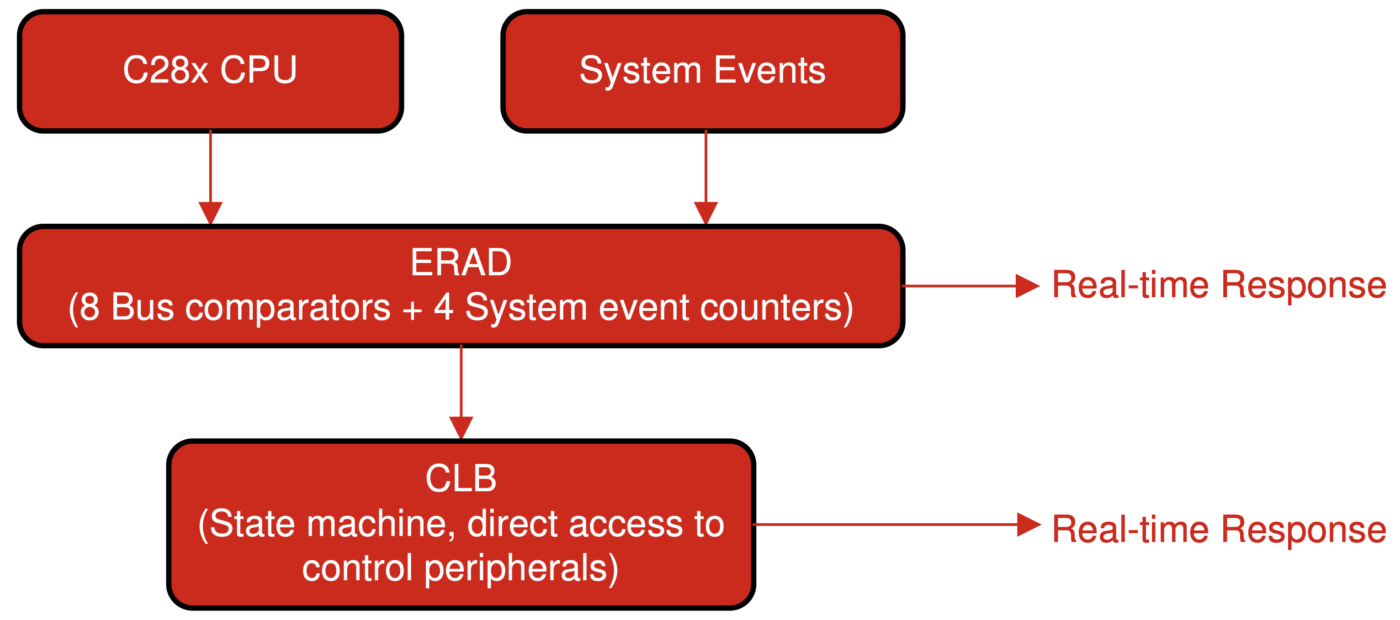
ERAD può generare in modo indipendente interrupt e flag a livello di sistema e inviarli ad altre periferiche come CLB.
Implementazione più rapida dei controlli motore FOC con le MCU C2000
L'implementazione del controllo della coppia variabile di un IPM-SynRM mediante un controllo vettoriale è complessa. In base alla velocità e alla coppia di carico, l'algoritmo deve controllare l'angolo di offset tra due sistemi di coordinate rotanti. In questo modo, il rotore può anticipare o ritardare elettricamente il campo magnetico rotante dello statore fino a ±90° attraverso un controllo a variazione di fase, per il funzionamento variabile tra RM e PMSM. Il complesso controllo della densità di flusso magnetico e della coppia del rotore può essere implementato rapidamente utilizzando il kit di sviluppo Motor Control Software di TI.
Il software, basato su decenni di esperienza congiunta, comprende un firmware che funziona sui moduli di valutazione (EVM) del controllo motore C2000 e sui progetti TI (TID). Due librerie di funzioni chiave per il controllo vettoriale sono InstaSPIN-FOC (controlli motore FOC senza encoder) e DesignDRIVE (controlli motore FOC che richiedono encoder).
Caratteristiche principali di InstaSPIN-FOC:
- Coppia o velocità FOC senza sensori
- Osservatore software di flusso, angolo, velocità e coppia (FAST) per le stime del rotore
- Identificazione dei parametri del motore
- Regolazione automatica dell'osservatore e dell'anello di controllo della coppia
- Prestazioni eccellenti per applicazioni a bassa velocità e molto dinamiche
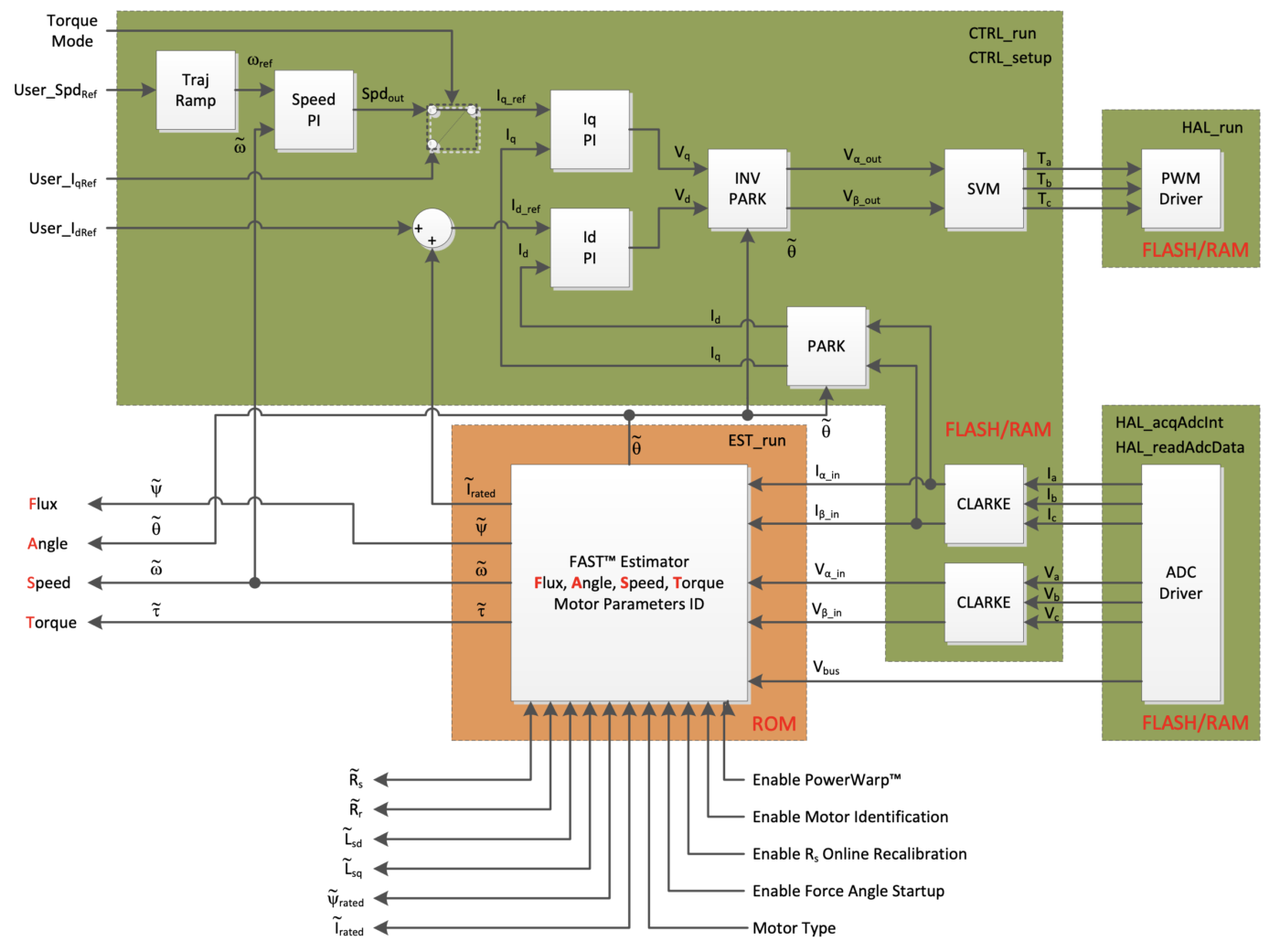
Una caratteristica particolare dell'anello di controllo FOC è l'algoritmo FAST adattivo che determina automaticamente la densità di flusso, l'angolo di corrente, la velocità e la coppia dalle tensioni e dalle correnti di fase (Figura 5). Grazie all'identificazione automatica dei parametri del motore, i progettisti possono mettere rapidamente in funzione un nuovo motore e affidarsi al sistema automatico per la regolazione precisa dell'anello di controllo.
Caratteristiche principali di DesignDRIVE:
- Velocità o posizione FOC con sensori
- Retroazione di posizione: resolver, encoder incrementali e assoluti
- Tecniche di rilevamento della corrente: shunt low-side, campionamento della corrente in linea e demodulazione con filtro sigma-delta
- Anello di corrente veloce (FCL): libreria software ottimizzata che sfrutta appieno le risorse hardware per accelerare il campionamento, l'elaborazione e l'attuazione del sistema al fine di ottenere la massima larghezza di banda di controllo per una determinata frequenza PWM nelle applicazioni di servocomando.
- Esempi di connettività in tempo reale
Esempio applicativo 1 per motori EV: una MCU controlla l'inverter di trazione e il convertitore c.c./c.c.
I produttori di automobili tendono a unire i tre componenti del sistema distribuito in un unico telaio e a ridurre al minimo il numero di MCU per ridurre i costi e la complessità del sistema. Tuttavia, ciò richiede una MCU con elevate prestazioni di controllo in tempo reale per gestire tutte e tre le funzioni. Per risolvere questo problema, il progetto di riferimento TIDM-02009 di TI dimostra come combinare un inverter di trazione EV/HEV e un convertitore c.c./c.c. bidirezionale controllato da un'unica MCU in tempo reale F28388DPTPS (Figura 6).
L'inverter di trazione utilizza un convertitore resolver-digitale (RDC) basato su software per pilotare il motore a una velocità elevata, fino a 20.000 giri al minuto. Lo stadio di potenza è costituito dal modulo di potenza a sei vie CCS050M12CM2 di Wolfspeed, basato su FET SiC e pilotato da un gate driver intelligente UCC5870QDWJRQ1 di TI. Un modulo PWM all'avanguardia con compensazione della pendenza integrata nel sottosistema del comparatore (CMPSS) genera la forma d'onda PCMC. Il percorso di rilevamento della tensione utilizza gli amplificatori ad altissimo isolamento AMC1311QDWVRQ1 di TI con ingressi da 2 V, mentre il percorso di rilevamento della corrente utilizza gli amplificatori di precisione ad altissimo isolamento AMC1302QDWVRQ1 di TI con ingressi da ±50 mV.
Il convertitore c.c./c.c. utilizza la tecnologia PCMC (controllo della modalità di corrente di picco) con topologia a ponte intero a variazione di fase (PSFB) e il raddrizzamento sincrono (SR). La sua bidirezionalità ha il vantaggio che il convertitore precarica il condensatore del bus c.c., eliminando il ricorso a relè di limitazione della corrente e resistori in serie. La comunicazione resistente alle interferenze basata su CAN FD è fornita dal modulo transceiver di controllo integrato TCAN4550RGYTQ1.
Esempio applicativo 2 per motori EV: convertitore c.a./c.c. bidirezionale efficiente da 6,6 kW
Per le uscite di potenza relativamente elevate, PMP22650 è un progetto di riferimento basato su FET GaN per un convertitore c.a./c.c. monofase bidirezionale che gestisce 6,6 kW di potenza. L'OBC caricatore può caricare la batteria di trazione con l'energia della rete e, viceversa, precaricare i condensatori DC-Link. Il dispositivo converte 240 V c.a. a 28 A sul lato primario in 350 V c.c. a 19 A sul lato secondario.
Una singola MCU F28388DPTPS controlla il collegamento bifase totem pole con correzione del fattore di potenza (PFC) che opera a una frequenza di commutazione di 120 kHz e una topologia CLLLC a ponte intero (C = condensatore, L = induttore) seguita dal raddrizzamento sincrono. Il convertitore CLLLC utilizza la modulazione di frequenza e di fase per regolare l'uscita e funziona a una frequenza variabile da 200 kHz a 800 kHz.
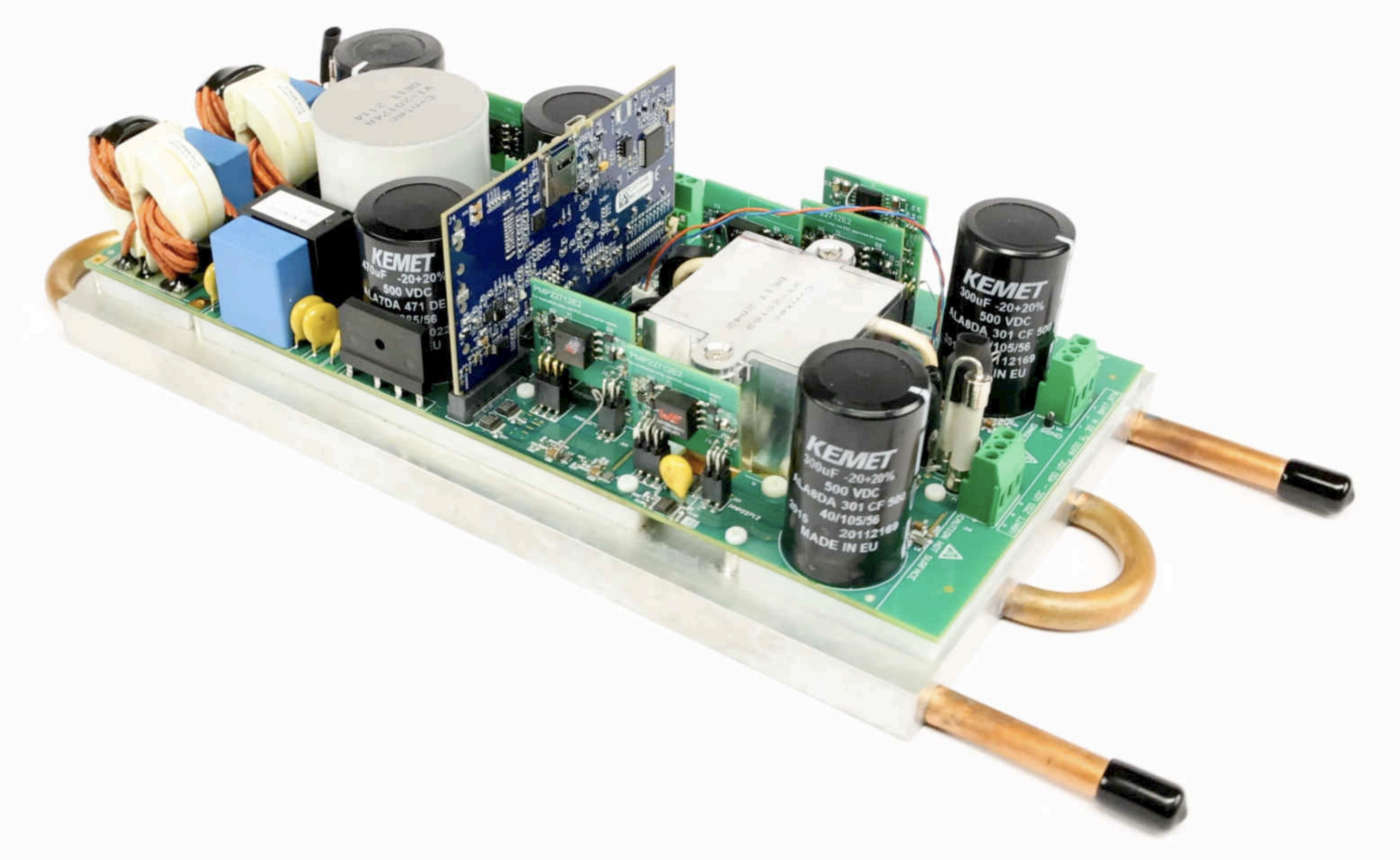
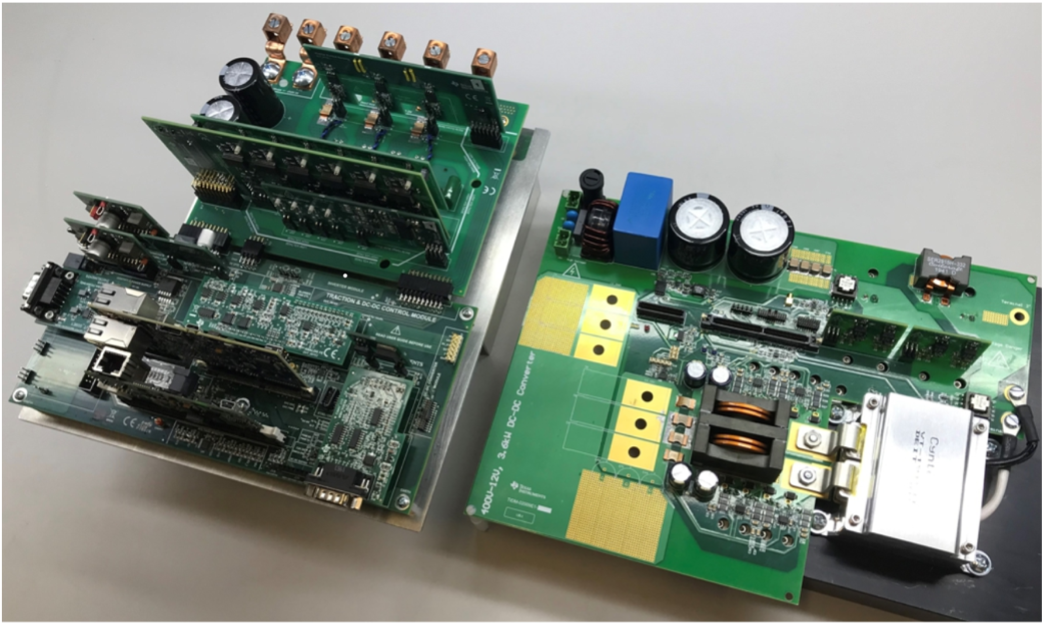
Nella Figura 7, la scheda di controllo TMDSCNCD28388D (al centro) controlla il circuito intermedio PFC sul lato primario (a sinistra) e il convertitore CLLLC a ponte intero sul lato secondario con raddrizzamento sincrono (a destra). Lo schema di questo progetto è illustrato nella Figura 8.

Un'efficienza fino al 96% a piena potenza e una densità di potenza a telaio aperto di 3,8 kW/litro sono rese possibili grazie all'uso di FET GaN ad alta velocità LMG3522R030-Q1 di nuova concezione. Il fattore di potenza è pari a 0,999 con una distorsione armonica totale (THD) inferiore al 2%. Un'alternativa a LMG3522 è il FET GaN LMG3422R030RQZT, anch'esso qualificato per il settore automotive, con una tensione di manovra di 600 V e una RDSon di 30 mΩ. Inoltre, integra il gate driver, la protezione da sovraccarico e il monitoraggio della temperatura.
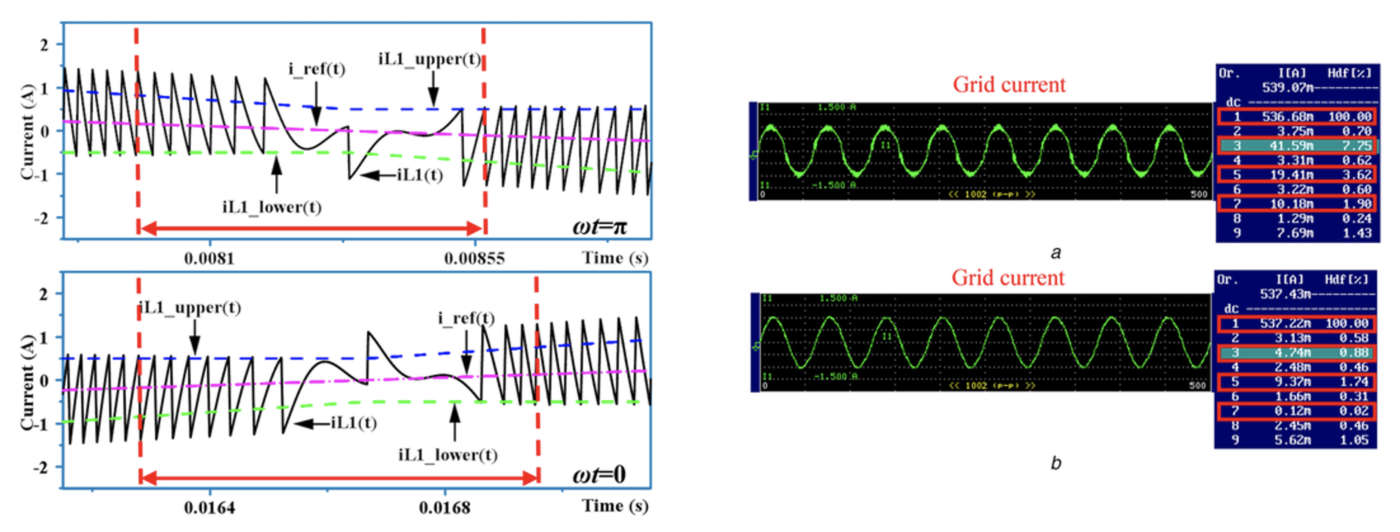
Una caratteristica speciale di questo convertitore c.a./c.c. è l'HHC, che riduce significativamente la distorsione di zero-crossing emulando la tensione attraverso il condensatore risonante. I risultati dei test mostrano anche una migliore risposta ai transitori e la progettazione di questo anello di controllo è più semplice rispetto al controllo di tensione a ciclo unico.
L'esempio di un inverter fotovoltaico mostra come l'HHC riduca efficacemente la distorsione dei transistor di commutazione a ponte a zero-crossing (Figura 9, a sinistra), eliminando così le emissioni e le distorsioni sulla rete elettrica. L'elevata THD di 7,8% della terza armonica sulla tensione di rete sinusoidale (Figura 9, in alto a destra) si riduce allo 0,9% utilizzando l'HHC (Figura 9, in basso a destra).
Per inciso, il progetto del circuito di questo convertitore c.c./c.c. da 6,6 kW si basa sul progetto di riferimento TIDA-010062 di TI, mentre il kit C2000WARE-DIGITALPOWER-SDK, citato in precedenza, facilita la progettazione di tali convertitori di potenza.
Conclusione
Le MCU in tempo reale serie C2000 di Texas Instruments possono affrontare quasi tutte le attività di controllo dell'elettronica di potenza per autoveicoli. L'applicazione di questi ecosistemi di MCU consente di progettare i sistemi in modo efficiente in termini di tempo e di costi, aggregando e controllando congiuntamente ciò che in genere sarebbe un'elettronica di sistema distribuita, utilizzando potenti MCU in tempo reale.
Come dimostrato, i driver di potenza intelligenti GaN e SiC sono relativamente facili da implementare. Un'ampia funzionalità di libreria e progetti di riferimento pre-certificati e completamente documentati facilitano l'implementazione di un controllo motore FOC e di un controllo HHC più efficiente dei convertitori.







{kind=link}