




I moderni processori e i circuiti integrati programmabili, caratterizzati da prestazioni decisamente spinte, sono oramai presenti ovunque, dai sistemi di infotainment agli apparati usati nei settori delle telecomunicazioni e industriale. Per fornire la potenza richiesta a questi dispositivi i produttori di convertitori DC/DC hanno dovuto superare numerosi ostacoli, a causa delle tensioni sempre più ridotte e delle correnti sempre più elevate necessarie allo scopo. La soluzione è rappresentata dai convertitori PoL modulari che sono in grado di adattarsi alle architetture dei bus e fornire tensioni “pulite” con un’elevata efficienza di conversione
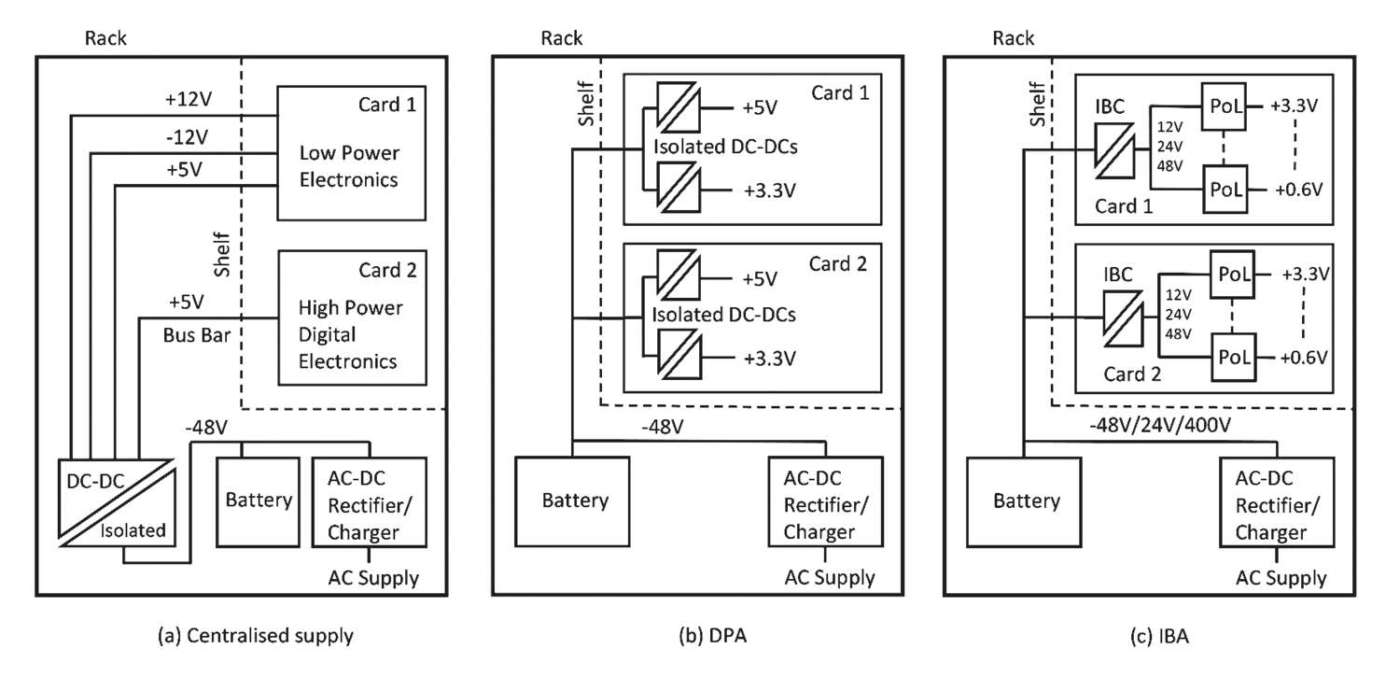
Dallo “storico” processore 8086, capostipite dell’architettura x86, realizzato con processo da 3µm e caratterizzato da una velocità di clock massima di 10 MHz, che richiedeva una tensione di 5 V per il core e le funzioni di I/O e dissipava 1,8 W, l’elettronica digitale ha sicuramente fatto molta strada in termini di prestazioni e requisiti di potenza. Con il trascorrere del tempo, il valore di questa unica tensione di alimentazione e gradualmente diminuito fino a 3,3 V. Complice la crescente esigenza di minimizzare i consumi di potenza di laptop e dispositivi mobili, è stato successivamente adottato un approccio che prevedeva l’uso di due valori tensioni: il core poteva essere alimentato con una tensione inferiore mentre per gli I/O veniva mantenuta la tensione di 3,3 V. Per quanto concerne gli odierni processori, realizzati con processi da 7 nm e operanti a frequenze di clock di 4 GHz, la tensione richiesta per l’alimentazione del core è inferiore a 1 V mentre la potenza di picco si attesta attorno a 140 W. L’utilizzo di una tensione di valore inferiore contribuisce a minimizzare i consumi di potenza, anche se ciò comporta una penalizzazione in termini di velocità. Tensioni di valore più elevato sollecitano gli isolatori in ossido metallico dei transistor che formano la CPU e contribuiscono a incrementare le perdite di potenza e per dispersione (leakage) imputabile all’”effetto tunnel” (ovvero la possibilità che un elettrone attraversi una barriera di potenziale maggiore dell’energia da esso posseduto, proprietà proibita dalla fisica classica): a questo proposito è utile tener presente che lo spessore dello strato di isolamento è di soli 0,5 nm, pari a circa la dimensione di due atomi. Per soddisfare la richiesta di sempre maggiori prestazioni, che devono essere ottenute con tensioni di valore inferiore, di solito si ricorre all’elaborazione parallela eseguita da CPU multi-core su cui girano più thread del codice, il che comporta un aumento del consumo di corrente e di potenza. Un’alimentazione centralizzata rappresentava una soluzione adeguata per le configurazioni che prevedevano una singola alimentazione e i livelli di precisione richiesti per i circuiti integrati erano garantiti grazie alle ridotte cadute di tensione ai capi delle connessioni che erano percorse da una corrente di bassa intensità. Nel momento in cui sono diminuiti i valori di tensione, sono di conseguenza aumentati quelli di corrente e le specifiche relative all’accuratezza sono diventate più rigorose. Per tale motivo si è reso necessario il ricorso a configurazioni che prevedevano un “bus intermedio” il cui compito era instradare la tensione nel sistema a un valore più elevato, solitamente 12 V, con valori di correnti ridotti: successivamente un convertitore DC/DC trasformava la tensione nel valore desiderato in prossimità del carico. Nelle applicazioni di telecomunicazioni gli alimentatori, oltre a essere affidabili, dovevano contribuire a minimizzare sia i costi sia l’impatto ambientale. Ciò ha comportato significativi cambiamenti delle architetture di potenza che dovevano adeguarsi all’evoluzione della tecnologia di elaborazione. Fino ai primi anni ‘90 si utilizzava un’architettura di tipo centralizzato, dove un convertitore AC-DC generava un bus a -48 V che prevedeva una batteria di back-up (Figura 1a). Un convertitore DC-DC quindi forniva le tensioni di valore inferiore, tipicamente 5 e +/-12 V, alle varie schede che popolavano gli armadi rack. La regolazione, sia statica sia dinamica, era abbastanza scarsa ed eventuali guasti di un singolo componente avrebbero potuto provocare la disattivazione dell’intero sistema. Per ovviare a questo inconveniente era stata concepita l’architettura DPA (Distributed Power Architecture): in questo caso la tensione di -48 V (supportata da una batteria di backup) veniva instradata su ciascuno scaffale che ospitava le schede sulle quali erano montati i convertitori DC-DC isolati che fornivano le tensioni finali richieste (Figura 1 b). Le schede ridondanti potevano essere rimpiazzate a caldo (hot swap) mentre il sistema era in funzione, mentre la regolazione della tensione sul carico era regolata in modo accurato. Il ricorso a numerosi convertitori DC-DC isolati si traduceva in un un aumento dei costi, ragion per cui alcune volte si ricorreva a configurazioni ibride, in cui convivevano architetture centralizzate e DPA. L’evoluzione successiva è rappresentata dall’architettura IBA (Intermediate Bus Architecture), il cui schema è riportato in figura 1c. In questo caso l’isolamento e la conversione della tensione a valori inferiori, tipicamente 5 o 12 V, sono effettuate da un singolo convertitore IBC (Intermediate Bus Converter) su ciascuna scheda. La tensione finale richiesta è invece fornita da economici convertitori DC/DC non isolati o convertitori PoL (Point of Load). Le tensioni del convertitore di bus intermedio hanno valori di -48 V, 24 V o addirittura 400 V per garantire bassi valori della corrente primaria e ridurre le perdite per conduzione. Il convertitore può essere completamente regolato, semi-regolato o non regolato in funzione della particolare applicazione considerata, poiché i convertitori PoL accettano un ampio intervallo di tensioni in ingresso e non richiedono un’alimentazione regolata in maniera rigorosa.
Moderne architetture di potenza
L’architettura IBA è oggigiorno molto diffusa e prevede l’uso di diverse versioni di convertitori di bus progettati per garantire la migliore efficienza complessiva per la particolare applicazione considerata.
All’aumentare dei carichi, le tensioni di 12 V del bus intermedio hanno iniziato a rappresentare un problema, a causa degli elevati valori di corrente coinvolti. Per tale motivo nei progetti più recenti la tendenza è aumentare la tensione del bus a 48 V e far ricorso a convertitori PoL in grado di convertire direttamente questo valore fino a livelli inferiori a 1 V. Poiché un rapporto di conversione così elevato produce impulsi di breve durata e alte correnti di picco nel convertitore, un approccio di questo tipo non sarebbe stato proponibile solo fino a qualche anno per ragioni di efficienza. Fortunatamente, grazie all’evoluzione della tecnologia dei semiconduttori e delle topologie di conversione della potenza, tale approccio è ora proponibile, specialmente se si tengono in considerazione fattori quali la riduzione delle perdite sul bus, delle dimensioni e dei costi. Laddove risulti giustificato per ragioni di efficienza, è possibile utilizzare più stadi di convertitori PoL in cascata. Per esempio, è possibile convertire la tensione da 48 V a 3,3 V, ovvero il valore di tensione richiesto dagli I/O e utilizzare un altro dispositivo PoL per effettuare un’ulteriore conversione da 3,3 a 1,8 V. I progettisti di sistemi possono generare un “albero della potenza” per rappresentare l’architettura da loro proposta: un esempio in tal senso, relativo a un SoC (System-on-Chip) di Xilinx è riportato in figura 2.
Specifiche dei convertitori PoL
Un convertitore PoL utilizzato in un’architettura IBA deve soddisfare specifiche molto rigorose per quanto attiene rumore di uscita, tolleranza della tensione, regolazione statica e dinamica. Un requisito tipico prevede una tolleranza di uscita contenuta entro +/- 3% in tutte le condizioni operative per i carichi più sensibili, come ad esempio i DSP che operano con una tensione di alimentazione per il core di 1 V con variazioni a gradino del carico di 5 A o superiori. L’anello di controllo del convertitore deve essere caratterizzato da un’elevata velocità, il che comporta un’alta frequenza di commutazione: per questo motivo è necessario ricorrere a semiconduttori ad alte prestazioni, come ad esempio i dispositivi ad ampio band-gap (WBG) che garantiscono le migliori prestazioni in termini di efficienza. Un altro aspetto da tenere in considerazione è la possibilità di porre in sequenza più convertitori PoL in modo che i tempi di salita e di discesa dei terminali di potenza si susseguano nell’ordine prestabilito. Sempre più spesso una CPU richiede di poter comunicare con un PoL per regolare dinamicamente la tensione di uscita e monitorare le prestazioni, come ad esempio la corrente di uscita, la temperatura ed eventuali segnalazioni di malfunzionamenti, utilizzando solitamente comandi PMBusTM trasmessi su un’interfaccia I2C. I convertitori PoL di più recente introduzione prevedono un controllo d’anello di tipo digitale per garantire prestazioni ottimizzate al variare dei carichi e della capacità di uscita in differenti applicazioni o al mutare delle condizioni con il trascorrere del tempo. Da quanto detto si evince che il controllo e il monitoraggio di un dispositivo PoL non sono operazioni semplici. Anche la topologia base di un classico convertitore buck è stata migliorata con la rettificazione sincrona e il funzionamento multi-fase al fine di assicurare livelli di efficienza accettabili con correnti di carico elevate e perdite contenute in presenza di carichi di valore ridotto. A volte le specifiche dei convertitori PoL variano in relazione al carico: CPU, FPGA, ASIC, SoC e ACAP hanno requisiti specifici che devono essere soddisfatti. In ogni caso il convertitore deve essere installato il più possibile vicino al carico per garantire le migliori prestazioni e ciò comporta l’insorgere di problematiche a livello di layout a causa della necessità di dover ospitare un gran numero di linee di indirizzi e di I/O. Per questa ragione la soluzione preferita è rappresentata dai moduli e solo raramente si ricorre a un’implementazione discreta dei PoL. L’approccio basato su moduli ha l’ulteriore vantaggio di sfruttare lo spazio disponibile in verticale, senza dimenticare che i moduli sono già collaudati, certificati e disponibili con ingombri (footprint) standard. Per un uso ottimale dei convertitori PoL è anche necessaria una cura meticolosa delle disposizioni sulla scheda dei piani di potenza (power plane), degli stati per la serigrafia (screen layer) e degli anelli di corrente che devono essere molto stretti e compatti nello stadio di potenza per attenuare per problematiche legate alle interferenze elettromagnetiche (EMI). L’implementazione di tutte queste caratteristiche risulta indubbiamente più semplice nel substrato di un modulo dedicato piuttosto che sulla scheda PCB. Poiché un tipico convertitore PoL risulta composto da oltre 100 componenti, le operazioni di stoccaggio e di approvvigionamento di un modulo sono senz’altro più semplici rispetto a quelle di una soluzione di tipo discreto. Sono altresì disponibili soluzioni ibride in cui lo stadio di potenza può essere acquistato sotto forma di modulo compatibile con un circuito integrato di controllo e di gestione della potenza fornito da terze parti. In questo caso l’integrato e posto sulla scheda e il modulo è posizionato su di esso o, a volte, sul lato opposto della scheda.
Formato dei convertitori PoL – Le possibili alternative
I convertitori PoL sono disponibili in vari formati, a fori passanti, a innesto o SiP, occupano uno spazio minimo sulla scheda e vengono proposti da numerosi fornitori come ad esempio Texas Instruments, RECOM, CUI, TRACO, Murata, ABB, XP Power, Advanced Energy e molti altri ancora. I moduli a montaggio superficiale sono preferiti in quanto permettono di ridurre i costi in produzione e vengono forniti in numerose varianti a livello di package, tra cui ad ala di gabbiano (gull-wing), LGA e iLGA (inspectable Land Grid Array). Sono disponibili modelli con uscite pari a frazioni di Volt e correnti superiori a 40 A. La serie “monoblocco” MYMGA di Murata, ad esempio, viene fornita in package LGA di dimensioni pari a soli 10,5 x 9 x 5,6 mm ed e in grado di fornire una corrente di 12 A. Questi convertitori PoL possono operare con tensioni di ingresso comprese tra 4,5 e 8 V oppure tra 8 e 15 V e l’uscita può essere regolata nell’intervallo da 0,7 a 1,8 V, mentre l’efficienza di picco è pari al 93,5%. In grado di soddisfare i requisiti di FPGA e CPU per quel che concerne i livelli di accuratezza dei terminali di tensione, questi convertitori assicurano una regolazione del carico massima di +/-1% (Figura 4). Il convertitore PoL PTH08T250W di Texas Instruments è invece disponibile in package a fori passanti e garantisce una regolazione del carico molto accurata (+/-1.5%) in un intervallo di carico di uscita più ampio, compreso tra 0 e 50 A: è anche prevista la possibilità di porre in parallelo più moduli per ottenere correnti più elevate. L’intervallo di tensione di ingresso varia da 4,5 a 14 V e l’uscita è regolabile tra 0,7 V e 3,6 V con un’efficienza che può arrivare al 96%. Entrambi questi moduli possono essere utilizzati in un’architettura IBA dove la tensione del bus è regolata in modo lasco, con conseguente miglioramento dell’efficienza complessiva. Tutti i convertitori prevedono un’ampia gamma di protezioni e alcuni risultano conformi alle specifiche definite da DOSA (Distributed power Open Standards Alliance) per quanto concerne prestazioni e piedinatura. Una caratteristica alla quale prestare attenzione è la possibilità di avviamento in presenza di carichi pre-polarizzati, che può essere richiesta in sistemi che prevedono più terminali di tensione. Convertitori PoL più complessi includono un maggior numero di funzionalità di controllo e di monitoraggio: un esempio è “Tunable LoopTM”, presente nei dispositivi della ‘serie Lynx’ di ABB, che permette all’utilizzatore di regolare l’anello di controllo della tensione per ottimizzare le prestazioni dinamiche e ridurre al minimo la capacità di uscita per qualsiasi carico. I costruttori di convertitori PoL modulari di solito propongono schede dimostrative dotate di interfacce GUI per impostare la risposta d’anello e i parametri di controllo e monitoraggio.







{kind=link}