




Il controllo motore è una tecnologia tipicamente embedded che negli ultimi anni si è sviluppata molto rapidamente in conseguenza del massiccio uso di motori in svariati contesti applicativi.
Il controllo motore, è in primo piano nelle attività di ricerca e sviluppo da lungo tempo per pervenire a soluzioni microelettroniche efficaci ed efficienti su due piani, quello software computazionale e quello hardware dell’elettronica di potenza integrabile a livello microelettronico. Per quanto concerne il piano computazionale, nel passato la tecnologia prevalente era quella dei DSP (Digital Signal Processor) che per soddisfare questo ambito applicativo emergente subirono un’evoluzione che portò alla realizzazione dei DSPMicrocontrollori, che replicavano l’architettura dei microcontrollori, con le soluzioni e le prestazioni dei DSP. La finalità di un motor controller è quella di poter agire in modalità manuale o automatica sull’azionamento del motore elettrico (partenza-arresto, avanzamento-inversione, velocità, torsione e protezione dai sovraccarichi di tensione).
Tipologie di motori
Varie sono le tipologie di motori elettrici e di conseguenza le strategie di controllo dipendono dalla loro struttura.
Motore DC a commutazione
Lo statore di un motore a magnete permanente DC è composto di due o più poli magnetici. Il rotore invece è composto da avvolgimenti connessi a un commutatore meccanico.
Motore brushless DC
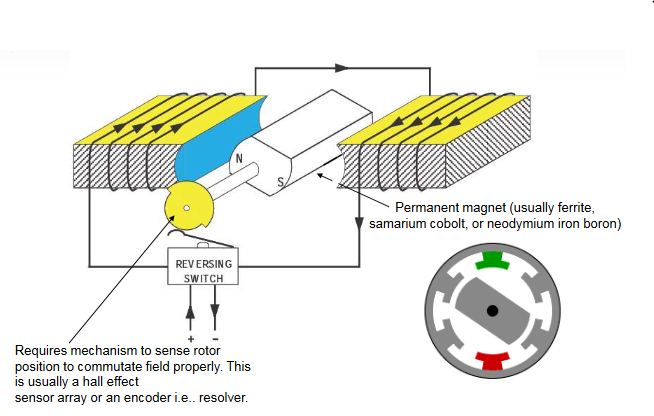
Il motore brushed DC ha la stessa struttura di un motore a commutazione DC ma senza la commutazione meccanica. I motori brushed DC, a causa del sistema meccanico di commutazione evidenziano numerosi problemi conseguenti dalla natura delle spazzole (elementi conduttivi morbidi di grafite): il consumo delle spazzole che, oltre a produrre malfunzionamento per cattivo contatto, produce anche polvere conduttiva (polvere di grafite) che deteriora la funzionalità dell’elettronica. Inoltre, data la natura del contatto delle spazzole a sfregamento, vi è un’elevata produzione di scariche elettriche nell’aria con elevato rischio di esplosione e incendio in ambienti caratterizzati da componenti altamente combustibili (gas, plastica, imballaggi, ecc.). Inoltre, le scariche elettriche rappresentano una fonte di emissioni elettromagnetiche di significativa presenza che interferiscono con l’elettronica di controllo. Il sistema di contatto meccanico delle spazzole comporta anche perdita di potenza e quindi di efficienza del motore brushless DC. I motori brushless DC sono stati inventati per far fronte alle problematiche applicative dei motori brushed DC, che in un primo tempo furono affrontati con la soluzione dei motori brushed AC. Dato che il sistema di commutazione meccanica serve ad ottenere la commutazione della direzione di flusso della corrente negli avvolgimenti del rotore, l’idea che ha portato alla realizzazione dei motori brushless DC è stata quella di produrre elettronicamente la commutazione fuori dal motore e poi applicarla in maniera fissa al motore in modo da controllarne la direzione di torsione alla stessa maniera di un commutatore meccanico. La commutazione elettronica della corrente di controllo del motore poteva essere eseguita da circuiti elettronici. La soluzione di controllo elettronico del motore elettrico che portava alla realizzazione dei motori brushless DC diventò una realtà praticabile con l’avvento dell’elettronica integrata che consentì di ridurre costi e dimensioni dell’elettronica di controllo e rese competitiva la realizzazione e l’impiego dei motori brushless DC. Tipiche applicazioni dei motori brushless DC sono quelle dove non è possibile eseguire sostituzioni delle parti (le spazzole) essendo tali sistemi sigillati (per esempio gli hard disk).
Motore elettrico lineare
Il motore elettrico è tipicamente a rotazione circolare, quindi per produrre moto lineare necessita di organi meccanici di trasformazione del moto circolare in moto lineare. Un’alternativa ai motori a rotazione sono i motori lineari a induzione. Il motore lineare è un motore elettrico che a differenza dei motori a rotazione, invece di produrre torsione produce una forza lineare nella direzione della sua lunghezza. Per esempio, il BLDM-A02 di H2W è un motore lineare tri-fase brushless, noto anche come servomotore lineare, utilizzabile come drive diretto di motore per servo controllo a loop chiuso, capace di velocità fino a 240 in / sec [6 m / sec]. Tipiche applicazioni per questo genere di motore sono le macchine pick and place, le macchine di misura delle coordinate, le macchine da taglio laser e a getto d’acqua, le macchine di ispezione visiva, ecc. Tra i vantaggi offerti dai motori elettrici lineari, quello delle elevate accelerazioni di piccoli carichi, di movimento lento dei carichi, dell’utilizzo di amplificatori brushless tri-fase standard.
Circuiti Integrati per il controllo motore
I circuiti integrati (IC) per il controllo motore, sin dalla loro introduzione hanno rappresentato un importante momento di innovazione sotto svariati aspetti in campi applicativi particolarmente sensibili a fattori come il costo, le dimensioni, le prestazioni, di cui il settore automotive e l’industriale dell’automazione sono sicuramente i più emblematici. Gli IGBT (Insulated-Gate Bipolar Transistor), comparsi tra gli anni ’80 e ’90, hanno rappresentato una vera e propria innovazione nell’elettronica di controllo della potenza elettrica. Essendo interruttori elettronici, la forte componente innovativa derivava dall’elevata frequenza di commutazione fino a raggiungere frequenze ultrasoniche. Gli IGBT giunti ormai alla terza generazione rappresentano oggi la funzionalità di base di dispositivi di controllo della potenza elettrica che ben si adattano a risolvere problematiche complesse di controllo motore. Gli IGBT di ultima generazione hanno sviluppato un ottimo rapporto tra velocità di commutazione è stabilità di comportamento in condizioni di utilizzo particolarmente estreme come quelle in ambito automotive nell’implementazione di inverter per pilotare i motori elettrici. Un esempio è il 1200 V IGBT S series di STMIcroelectronics ottimizzato per l’uso a bassa frequenza (fino a 8 KHz), caratterizzato da un un basso Vce(sat). Il 1200 V IGBT S series è basato sulla tecnologia di terza generazione trench-gate field-stop.
Silicon Carbide: la soluzione ibrida
I dispositivi in tecnologia Silicon Carbide (SiC) fanno parte della categoria wide band gap semiconductors, caratterizzata da funzionalità particolarmente attrattive per la categoria dei semiconduttori ad alta potenza. L’impiego di dispositivi SiC nell’ambito delle applicazioni di controllo motore e di controllo della potenza elettrica sta rappresentando un vero e proprio momento di innovazione grazie a peculiarità come il risparmio energetico, la riduzione delle dimensioni, l’integrazione e l’affidabilità, tutte tematiche cui settori come l’automotive e il controllo nell’automazione industriale sono particolarmente sensibili. Questi dispositivi combinano la tecnologia veloce basata sul silicio con quella dei diodi SiC, ottenendo una soluzione tecnologica di natura ibrida. Infineon ha prodotto una grande quantità di tali dispositivi integrati di potenza nell’ambito di una famiglia di componenti denominata CoolSiC. L’incremento della frequenza di commutazione porta ad importanti vantaggi nella realizzazione dei motori relativamente alla componente magnetica. Secondo uno studio eseguito da Infineon, grazie alla riduzione di volume e peso che si ottiene, per il costo di sistema ne deriva una riduzione fino al 20%.
Microelettronica per il controllo della potenza
Il controllo della potenza è una intrinseca combinazione di software e hardware. La componente hardware sono i dispositivi di controllo elettronico come gli IGBT, i diodi di potenza, ecc., mentre la componente software è quella che attiene al controllo della componente hardware, ove il modello di controllo diventa sempre più complesso e sofisticato. NXP ha sviluppato la famiglia Power Architecture processor, un’ampia gamma di di processori per supportare il cospicuo ventaglio applicativo che si è aperto negli ultimi anni con l’impiego dell’elettronica di potenza e il conseguente sviluppo della metodologia di controllo sia in ambito industriale che in ambito civile. La disponibilità di architetture di computing particolarmente ottimizzate verso il controllo e la gestione di dispositivi di potenza consente agli sviluppatori di ottenere prestazioni diversamente non ottenibili nell’ambito del controllo. La famiglia di processori a 32 bit MPC57xx di NXP è basata sulla tecnologia Power Architecture per le applicazioni power train automotive e industriali oltre alle altre possibilità di controllo e gestione funzionale dell’autoveicolo.
Tra le caratteristiche peculiari:
· Tecnologia flash ad alta densità floating-gate
· Scalabilità dal singolo al multi-core (32-300 MHz)
· Ridondanza on-chip
· Parallel processing e ampia dotazione di periferiche on-chip
· Affidabilità in mbienti ostili.
NXP Cup: controllo motore e guida autonoma
 NXP Cup è una sfida internazionale globale tra gruppi di studenti Master di università di tutto il mondo ideata anni fa da Freescale Semiconductor per promuovere a livello accademico universitario lo studio dei sistemi embdded applicati all’automazione veicolare controllata da motori elettrici e servomotori. La competizione consiste nello sviluppare un modello di controllo dell’avanzamento e velocità tramite motori elettrici in CC e della direzione tramite servomotore di un modello di automobile in scala 1:18, per ottenere il giro più veloce su un tracciato in modalità completamente autonoma assistita da telecamera CCD a scansione di linea. I gruppi di studenti sviluppano il modello di controllo motore utilizzando una piattaforma di computing a core ARM M0+ integrata su una developing board Freedom KL25Z e una board di controllo motore. Entrambe le board dispongono di un BSP (Board Support Package) che consente in ambiente Matlab/Simulink di sviluppare un modello di controllo e di generare (deploy) il codice eseguibile dal processore per controllare tramite l’elettronica di controllo motore i motori elettrici in CC e il servosterzo in funzione delle informazioni visuali fornite dalla telecamera a scansione di linea. La NXP Cup si svolge in due fasi: qualificazioni (fine marzo 2019) in varie sedi universitarie europee ed extraeuropee e la finale che designa un team vincitore della CUP.
NXP Cup è una sfida internazionale globale tra gruppi di studenti Master di università di tutto il mondo ideata anni fa da Freescale Semiconductor per promuovere a livello accademico universitario lo studio dei sistemi embdded applicati all’automazione veicolare controllata da motori elettrici e servomotori. La competizione consiste nello sviluppare un modello di controllo dell’avanzamento e velocità tramite motori elettrici in CC e della direzione tramite servomotore di un modello di automobile in scala 1:18, per ottenere il giro più veloce su un tracciato in modalità completamente autonoma assistita da telecamera CCD a scansione di linea. I gruppi di studenti sviluppano il modello di controllo motore utilizzando una piattaforma di computing a core ARM M0+ integrata su una developing board Freedom KL25Z e una board di controllo motore. Entrambe le board dispongono di un BSP (Board Support Package) che consente in ambiente Matlab/Simulink di sviluppare un modello di controllo e di generare (deploy) il codice eseguibile dal processore per controllare tramite l’elettronica di controllo motore i motori elettrici in CC e il servosterzo in funzione delle informazioni visuali fornite dalla telecamera a scansione di linea. La NXP Cup si svolge in due fasi: qualificazioni (fine marzo 2019) in varie sedi universitarie europee ed extraeuropee e la finale che designa un team vincitore della CUP.







{kind=link}