




I progettisti di elettronica di potenza si sforzano di aumentare l'efficienza e la densità di potenza in progetti industriali e automobilistici che vanno dagli azionamenti multiasse all'accumulo di energia solare, fino alle stazioni di ricarica dei veicoli elettrici (EV) e ai caricabatterie di bordo degli EV. Una delle principali sfide progettuali consiste nell'ottenere migliori prestazioni di controllo in tempo reale, riducendo al contempo i costi del sistema. Un approccio comune per affrontare questa sfida è quello di utilizzare microcontrollori (Mcu) altamente integrati con periferiche analogiche e di controllo in grado di elaborare il loop di controllo a bassissima latenza.
Prestazioni di controllo in tempo reale: è tutta una questione di latenza
Prima di immergerci in alcuni esempi, analizziamo la latenza ad alto livello. Negli azionamenti multiasse, nella robotica, negli inverter solari con sistemi di accumulo di energia, nelle stazioni di ricarica dei veicoli elettrici e nei veicoli stessi, le prestazioni di controllo sono direttamente correlate alla velocità con cui una Mcu è in grado di campionare, elaborare e controllare i segnali.
La Figura 1 mostra la catena del segnale in tempo reale e la latenza del segnale da quando il convertitore analogico-digitale (Adc) misura i segnali a quando la Cpu elabora le informazioni e, infine, quando il modulatore di larghezza di impulso (Pwm) controlla lo stadio di potenza. Questo numero deve essere il più piccolo possibile per ottenere un'elaborazione dell'anello di controllo a bassissima latenza.
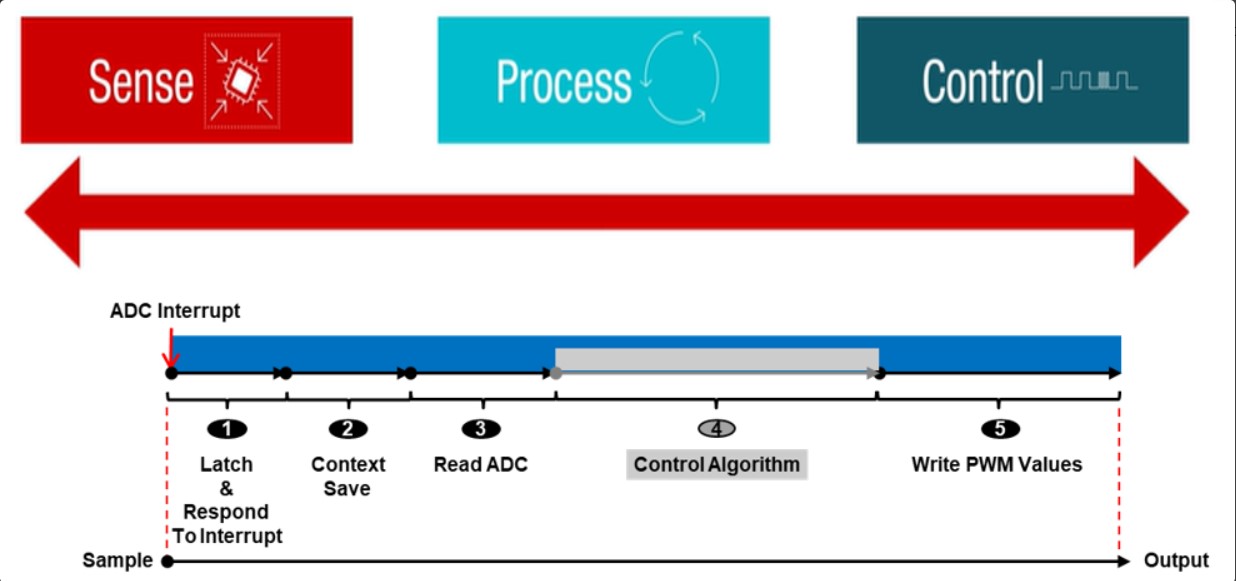
Per l'alimentazione digitale, ottenere una maggiore densità di potenza può significare aumentare le frequenze di commutazione di uno stadio DC/DC da 50 kHz a 100 kHz, 500 kHz e anche di più. Se si utilizza una Mcu a 100 MHz con un loop di regolazione sincronizzato alla frequenza PWM, a 10 kHz si hanno a disposizione 10.000 cicli di Cpu tra ogni interrupt PWM, che scendono a 1.000 cicli a 100 kHz. Con l'aumento della frequenza, il tempo disponibile per rilevare il controllo del processo diminuisce, ed è necessario ottimizzare l'architettura dell'Mcu per risparmiare ogni ciclo possibile nella catena del segnale in tempo reale.
Consentire alimentazioni di nuova generazione nei sistemi di accumulo di energia con inverter solare
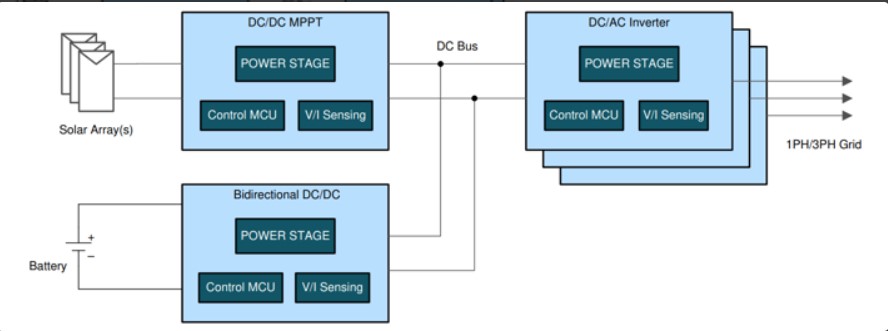
Il mercato degli inverter solari si sta evolvendo con l'integrazione di sistemi di accumulo di energia (inverter ibridi), come mostrato nella Figura 2, che comportano la sfida del controllo bidirezionale del flusso di energia. Un'architettura a chip singolo richiede una Mcu con un gran numero di canali PWM ad alta risoluzione e ingressi ADC aggiuntivi ad alta larghezza di banda, come la Mcu a 32 bit TMS320F28P650DK C2000Tm.
Per soddisfare la crescente domanda di energia rinnovabile in tutte le applicazioni, gli inverter solari necessitano di una maggiore efficienza di potenza e di migliori prestazioni di distorsione armonica totale. Un approccio consiste nel passare a nuove architetture di potenza per inverter multifase e multilivello, che in genere sono implementate con una combinazione di complessi algoritmi di potenza e logica esterna aggiuntiva, come un dispositivo logico programmabile complesso o un array di gate programmabili in campo, per attivare e disattivare gli interruttori di potenza con la giusta sequenza e in modo sicuro. Ciò comporta un aumento dello spazio sulla scheda e dei costi del sistema.
Un'unità Mcu in grado di supportare la logica personalizzata, la banda morta minima e la logica combo illegale (una funzione dell'Mcu che impedisce una sequenza di accensione e spegnimento distruttiva) tra i diversi moduli PWM contribuirà a semplificare ulteriormente i progetti, offrendo ai progettisti l'opportunità di ridurre o addirittura eliminare la logica esterna, riducendo al contempo i costi.
È inoltre importante accoppiare strettamente le unità PWM con comparatori integrati a finestra di tipo analogico per proteggere i convertitori di potenza da eventi di sovracorrente e sovratensione. A seconda della topologia di potenza, è necessario scegliere un Mcu con unità PWM in grado di implementare il controllo della corrente di picco e della corrente di valle dei convertitori in modalità risonante.
Integrazione più semplice e veloce nei caricabatterie di bordo per veicoli elettrici
Con l'aumento del numero di veicoli elettrici in tutto il mondo, i progettisti devono trovare nuove soluzioni per integrare ulteriormente e ridurre i costi del caricabatterie di bordo. Un'implementazione tipica consiste in un Mcu per lo stadio di correzione del fattore di potenza del caricabatterie di bordo e un altro Mcu per lo stadio DC/DC del caricabatterie di bordo, con isolamento intermedio.
Sebbene l'implementazione di un'unica Mcu possa aumentare l'isolamento necessario per inviare i segnali all'Mcu, il costo è compensato dai risparmi ottenuti grazie al numero ridotto di componenti, tra cui un minor numero di ricetrasmettitori Controller Area Network, regolatori di tensione, circuiti integrati di gestione dell'alimentazione, amplificatori operazionali e isolamento per la comunicazione con l'Mcu host.
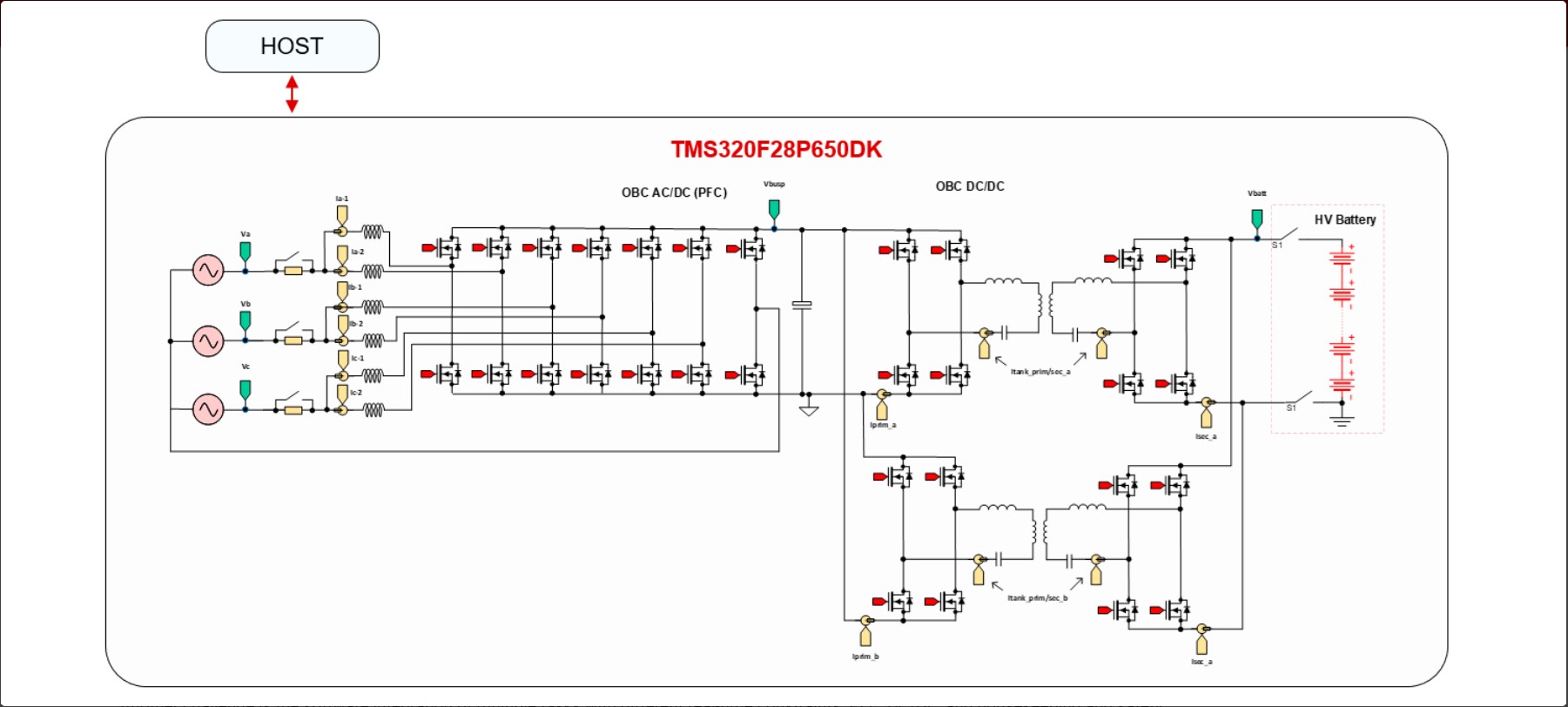
La Figura 3 mostra una singola Mcu che controlla una topologia di stadi di potenza trifase per caricabatterie di bordo fino a 22 kW. Lo stadio PFC è un totem interleaved a due fasi e lo stadio DC/DC è un doppio condensatore-induttore-induttore-capacitore (CLLLC) che riduce le dimensioni del trasformatore e la corrente nominale del transistor a effetto campo.
Dopo aver definito le risorse hardware minime necessarie per l'Mcu (PWM, ADC, comparatori), è necessario cercare una maggiore integrazione del software, riducendo al contempo l'overhead della Cpu. Poiché l'integrazione consente di campionare un maggior numero di segnali su un unico dispositivo, la scelta di un Mcu che includa un ADC con sovracampionamento e calibrazione dell'offset basati su hardware semplifica i progetti software, rendendo l'Mcu più efficiente dal punto di vista dei cicli e in grado di eseguire il loop di controllo più velocemente.
Un'altra sfida è l'integrazione software di più task con diversi vincoli in tempo reale: PFC, DC/DC, manutenzione e sicurezza devono coesistere, il che rende più complesso lo sviluppo del software.
Il passaggio da un'unità Mcu a singolo core a un'architettura Mcu multicore con memoria, PWM e risorse analogiche distribuite tra i core dell'unità MCU consentirà di assegnare frequenze diverse del loop di controllo ai vari core: un core per controllare il PFC e un altro per far funzionare i due CLLLC, ad esempio. Ogni core può eseguire il loop di controllo a una frequenza diversa e indipendente: il totem è tipicamente a frequenza fissa, ma lo stadio di conversione di potenza DC/DC del caricabatterie di bordo (Figura 3) cambia. Il passaggio a un'architettura multicore consente anche una protezione da sovracorrenti e sovratensioni più affidabile e precisa (perché è possibile ottimizzare ciascun loop di controllo per core) e offre l'opportunità di ridurre i costi eliminando la necessità di componenti di monitoraggio esterni.
I veicoli elettrici che si ricaricano in pochi minuti, i sistemi solari e l'accumulo di energia in ogni casa, le fabbriche con robot più efficienti e l'automazione con un'impronta energetica ridotta: l'innovazione nelle Mcu di controllo in tempo reale contribuirà ad aprire la strada a un mondo più pulito, più sicuro e più efficiente.







{kind=link}