




La silenziosità della propulsione elettrica pone il problema di far percepire ai pedoni l’avvicinarsi delle auto; i costruttori l’hanno risolto in vari modi, quasi sempre aggiungendo un suono che talvolta ha nulla di motoristico
Quando la gran parte degli autoveicoli sarà elettrica godremo della tranquillità di macchine che scorrono per le vie delle città fluide, quasi in silenzio; in realtà questo è destinato a rimanere poco più di un sogno, perché man mano che ci si godeva il traguardo di una mobilità che rendesse i centri urbani meno rumorosi, ci si accorgeva che non sentire il rumore del motore può costituire, per il pedone o il ciclista che attraversi la strada con poca prudenza, ma anche per le persone ipovedenti, un serio pericolo. Infatti, spesso un’auto silenziosa diventa qualcosa del cui approssimarsi ci si accorge quando è troppo tardi. Il problema è stato percepito a tal punto da essere preso in considerazione dalle legislazioni di tutti i continenti e divenuto oggetto di interventi normativi.
Ecco perché i costruttori di veicoli elettrici e full-hybrid hanno deciso di inventarsi un rumore da far produrre ai propri veicoli, installando a bordo un generatore di rumore che pilota un altoparlante e in generale un trasduttore ad alta efficienza, tramite un amplificatore di potenza. Sono nati così i sistemi AVAS (Acoustic Vehicle Alerting System) che pur risultando di minore impatto acustico rispetto al rombo dei motori endotermici, riescono, generando suoni facilmente distinguibili da quelli dell’ambiente sia urbano che extraurbano, a far percepire l’avvicinamento di un veicolo anche quando viaggia a basse velocità (alle alte e in presenza di selciato, i pneumatici rendono comunque avvertibile l’auto). In questo modo, l'AVAS contribuisce alla sicurezza stradale abituando gli utenti della strada a riconoscere l’approssimarsi dei veicoli elettrici e tutelando i cosiddetti “utenti della strada vulnerabili (VRU)” come pedoni, ciclisti e bambini.
L’idea nasce in Europa
Siccome soprattutto a velocità ridotte le auto elettriche sono troppo silenziose, per rendere più avvertibile il loro avvicinamento sono state escogitate soluzioni divenute norme di legge a iniziare dal Vecchio Continente, dove l’Unione Europea ha deciso che le auto elettriche e i veicoli ibridi costruiti a partire dal luglio 2019 debbano emettere un segnale acustico quando viaggiano in retromarcia e in marcia avanti fino a una velocità di 20 km/h. Oltre tale velocità, il rumore del rotolamento dei pneumatici rende percettibile l’approssimarsi dell’auto e il suono può essere disattivato.
I sistemi che consentono alle auto elettriche di emettere un segnale acustico a velocità ridotte, ossia gli AVAS, secondo il Parlamento Europeo devono produrre qualcosa che abbia un’intensità comparabile a quella del rumore prodotto da un’auto con motore a combustione interna della medesima categoria di veicolo; la tecnologia AVAS è stata resa obbligatoria per tutte le auto prodotte a partire da luglio 2021, con la Decisione UE ECE R138.
La United Nations Economic Commission for Europe si è spinta anche oltre pubblicando sul web il suono che idealmente dovrebbe essere prodotto: l’indirizzo per ascoltarlo on-line è https://unece.org/fileadmin/DAM/for_PR_Silent_car__AVAS_sound.mp3. Un altro suono campione si può reperire come file WAV sul sito web di Hella, all’indirizzo https://www.hella.com/soe/en/Products/Product-detail-4957/?pid=2597. Chiaramente medesima intensità non significa che all’orecchio umano venga percepita alla stessa maniera, perché il nostro apparato uditivo presenta una sensibilità che prescinde dalla pressione sonora e che viene definita da una curva che ha come picco una banda intorno ai 5 kHz; quindi, il rumore artificiale viene percepito in maniera differente, anche e soprattutto perché composto da uno spettro studiato appositamente.
Il problema rappresentato dai veicoli elettrici per la sicurezza stradale è stato preso in considerazione non solo in Europa, perché anche negli Stati Uniti i costruttori di veicoli hanno cominciato a occuparsi di suoni artificiali per auto elettriche già dal 2010; ma solo nel febbraio 2018, ciò si è tradotto in un intervento normativo da parte del Dipartimento dei trasporti, secondo cui a partire da settembre 2020 i veicoli elettrici e ibridi devono emettere un segnale acustico quando viaggiano a velocità inferiori o uguali a 19 mph (30 km/h).
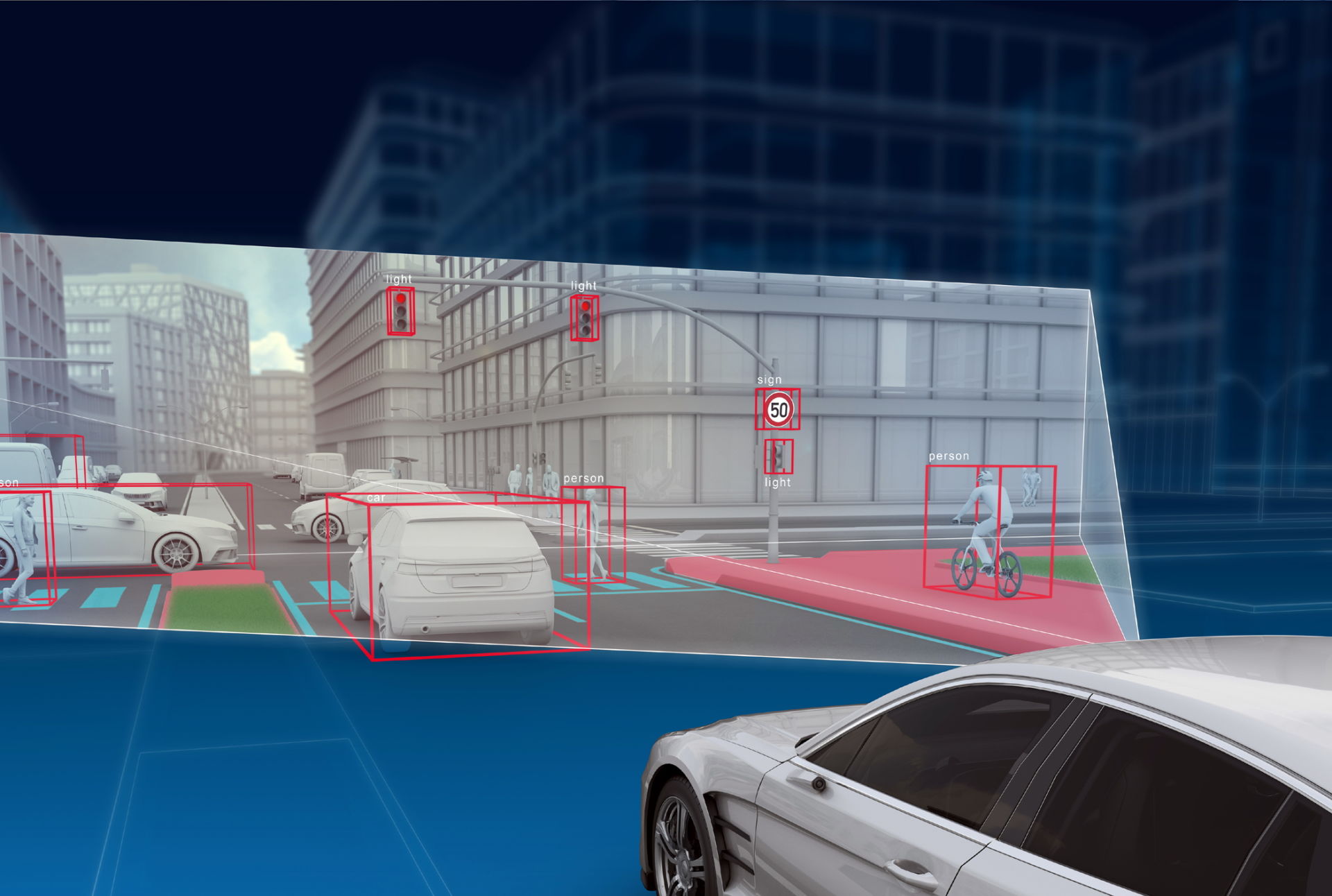
Dotare le auto elettriche di segnali acustici non significa rendere necessariamente il traffico stradale più rumoroso, perché è possibile integrare l’AVAS nei moderni sistemi di assistenza alla guida, ad esempio beneficiando della capacità dei più recenti dispositivi ADAS che sono in grado di riconoscere i pedoni (Pedestrian Detection System). Un sistema del genere è implementato da Mobileye (Intel) sviluppato per ZF e chiamato S-Cam4; è composto da una telecamera semplice
a singola ottica progettata per ottenere ad esempio la frenata automatica attivata dal riconoscimento di pedoni (AEB) e da una telecamera three-lens TriCam4 per la ripresa su lunga distanza più una lente fish-eye per migliorare la visione a corto raggio estendendo l’angolo di visuale.
Abbinandoli a tali sistemi, gli AVAS possono quindi essere attivati esclusivamente quando nella direzione di movimento dell’autoveicolo vengono rilevati pedoni e ciclisti (Figura 1).
Come funziona l’AVAS
I suoni artificiali del veicolo vengono generati utilizzando altoparlanti o attuatori che producono la vibrazione degli elementi strutturali del veicolo proporzionali ai parametri del veicolo come velocità, posizione del pedale dell’acceleratore e rapporto della trasmissione (marcia) inserito. Proprio come i veicoli tradizionali spesso emettono un suono leggermente diverso durante la retromarcia, il sistema AVAS può anche amplificare un suono di retromarcia uniforme, come ad esempio il “beep” periodico dei carrelli elevatori e dei mezzi d’opera, per informare le persone circostanti.
Nella versione canonica l’AVAS consta di un generatore di suono i cui parametri di frequenza, spettro, timbrica e via di seguito sono subordinati alle condizioni di marcia, di un’interfaccia di solito CAN-Bus verso la ECU motore che passi le informazioni del caso, di un amplificatore di potenza che pilota un altoparlante o altro trasduttore acustico in grado di produrre suoni di intensità sufficiente ad essere uditi a circa una ventina di metri.
Il suono prodotto non è standard né vi è ad oggi un’unificazione a livello europeo o mondiale che imponga ai costruttori una convenzione: si va dalla simulazione del motore endotermico a suoni vagamente musicali, tuttavia c’è un comun denominatore, cioè il rumore artificiale deve variare di importanza e tonalità al crescere della velocità e dell’accelerazione del veicolo, come avverrebbe in un motore a combustione interna accelerando. Ogni costruttore si è poi sbizzarrito nel creare qualcosa di personalizzato: molto originale è il rumore emesso ad esempio dalla Hyundai Tucson Ibrida prodotta per il mercato europeo.
La progettazione di un sistema AVAS parte dalla definizione e sintesi di un rumore base, al quale viene associata un’altezza sonora; nel sintetizzare il rumore bisogna pensare che le basse frequenze si diffondono con difficoltà, seppure siano omnidirezionali, senza contare che per essere udite devono essere irradiate da grossi trasduttori che richiedono l’impegno di elevate potenze. Non è l’ideale neppure utilizzare frequenze elevate, perché le persone anziane non riescono a percepirle bene a causa dell’irrigidimento dell’apparato uditivo.
I sistemi AVAS devono quindi operare entro una gamma di frequenze intermedie, che non a caso sono quelle dello spettro audio verso le quali l’orecchio manifesta la più elevata sensibilità.
Il suono non deve tuttavia essere monotonale, ma piuttosto modulabile in frequenza e non deve essere correlato a una singola frequenza, perché dev’essere piuttosto l’insieme di più frequenze a costituire uno spettro variamente composto. Un fattore determinante deve essere l’altezza del suono, modulando la quale sarà ad esempio possibile intuire se un veicolo sta rallentando o accelerando.
Alcuni sistemi adottano uno spettro basato sul rumore bianco, che è un insieme di frequenze collocato nell’intera gamma audio riprodotte ciascuna in maniera casuale e con ampiezze differenti e non periodiche; classico è quello ottenibile in maniera molto semplice amplificando la tensione ai capi di una giunzione PN polarizzata inversamente, quale quella di base-emettitore di un transistor BJT. Il rumore bianco può anche essere assimilato a quello che si sente negli apparati radio analogici durante la sintonia nelle zone non modulate, oppure al rumore delle onde che si esauriscono a riva.
Vari costruttori di semiconduttori e sistemi automotive sviluppano soluzioni AVAS: per esempio Continental, ST, Hella; l’AVAS di Continental soddisfa le norme UN R138.01 (UE, Cina) e FMVSS 141 (USA) inerenti ai requisiti dei veicoli elettrici.
Continental, per esempio, sviluppa soluzioni AVAS one-box, ossia tutti collocati nello stesso contenitore dove si trova l’altoparlante: microcontrollore, interfaccia CAN-Bus FD, amplificatore; ma produce anche interessanti sistemi che invece dell’altoparlante sfruttano speciali trasduttori applicati alla carrozzeria del veicolo e che vibrando fanno produrre vibrazioni acustiche al veicolo stesso (full-range exciter).
Hella propone soluzioni integrate AVAS è in grado di comunicare in tempo reale con il CAN-BUS del veicolo, garantendo un'interazione fluida con gli altri componenti dell'elettronica di bordo. Il suono richiesto dalla normativa è generato da un altoparlante da 2 pollici con amplificatore integrato, in grado di produrre un livello di pressione sonora fino a 86 dB. La soluzione Hella è tutta contenuta in un alloggiamento antipolvere e impermeabile con classe di protezione IP 6K9K (Figura 2).

Il sistema Hella offre ai progettisti automotive la possibilità di modificare il suono secondo i propri canoni, rimanendo comunque negli standard e nei limiti della legislazione dei Paesi di applicazione, ovvero negli standard globali sul rumore (OICA) riguardanti le emissioni sonore dei veicoli.
Quanto a ST, offre un ampio portafoglio di componenti e soluzioni per la progettazione dei sistemi AVAS, grazie ai suoi amplificatori di potenza audio in classe D per autoveicoli, al monitoraggio incorporato della diagnostica e della corrente degli altoparlanti, a un circuito integrato del sistema di gestione dell'alimentazione che include interfacce CAN e LIN, insieme alla MCU a 32 bit che esegue il firmware per la generazione del suono.
Proprio di ST è lo schema a blocchi proposto nella Figura 3, che descrive il classico AVAS.
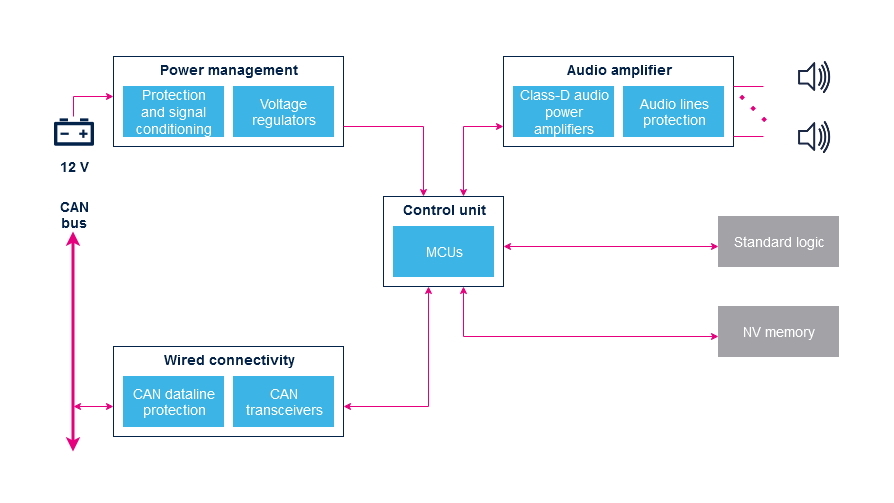
Nello schema si vede l’unità di controllo basata su microcontrollore, che svolge questi compiti:
• genera il suono base nello spettro desiderato e lo rende disponibile alla propria uscita;
• tramite la connessione CAN e l’apposito transceiver dialoga con la ECU motore e il sistema ADAS di bordo per acquisire i parametri necessari a modulare il suono;
• si interfaccia a una memoria non volatile dove risiedono i campioni dei suoni.
Il suono prodotto viene poi inviato a un amplificatore in classe D, che permette di avere elevate potenze d’uscita con un’efficienza che sta di pochi punti percentuali sotto il 100% e quindi di pilotare l’altoparlante o trasduttore a vibrazione con elevata resa e consumi minimi, dettaglio questo non trascurabile quando si tratta di veicoli alimentati a batterie, dove tutta l’elettricità possibile deve essere dirottata sulla trazione.







{kind=link}