




I regolatori switching sono ampiamente utilizzati e una delle più famose topologie relative a questo tipo di regolatori è il convertitore buck (noto anche come convertitore step-down). I produttori offrono in genere circuiti integrati buck (IC) con controller e FET integrati. Tali regolatori buck implementano principalmente la conversione step-down della tensione. Tuttavia, possono anche essere utilizzati per creare molti altri progetti. Il presente articolo presenta una varietà di progetti che utilizzano i circuiti integrati buck regulator, spiega i loro principi operativi e discute le considerazioni pratiche per l'implementazione di questi progetti.
Convertitore Step-down con un buck regulator IC
La famiglia di circuiti integrati regolatori buck ISL8541x di Renesas sono dotati di FET integrati high-side e low-side, diodi di boot e circuito di compensazione interni, che riducono al minimo la quantità di componenti esterni e consentono dimensioni totali dell’applicazione finale molto ridotte. Inoltre, questa famiglia di regolatori ha un ampio intervallo di tensione in ingresso che va da 3 V a 40 V al fine di supportare una batteria a più celle e una varietà di uscite di tensione regolate. In questo articolo, il regolatore buck ISL85410 viene utilizzato per illustrare vari progetti applicativi.
Un convertitore step-down diventa necessario quando il livello di tensione richiesto è inferiore alla sorgente di tensione disponibile nel sistema. Ad esempio, si prenda un sistema che ha una batteria da 12 V come ingresso ma che richieda delle fonti di tensione inferiori come 5 V, 3,3 V o 1,2 V per alimentare microcontrollori, I/O, memoria e FPGA. Convertendo in modo efficiente una tensione elevata in una bassa tensione, il convertitore buck prolunga la durata della batteria del sistema, riduce la dissipazione del calore e migliora l'affidabilità. La Figura 1 mostra lo schema semplificato di un convertitore step-down che utilizza il regolatore IC buck ISL85410. La tensione di uscita ha la stessa polarità della tensione di ingresso e il rapporto di conversione della tensione in modalità a conduzione continua (CCM) può essere espresso come:
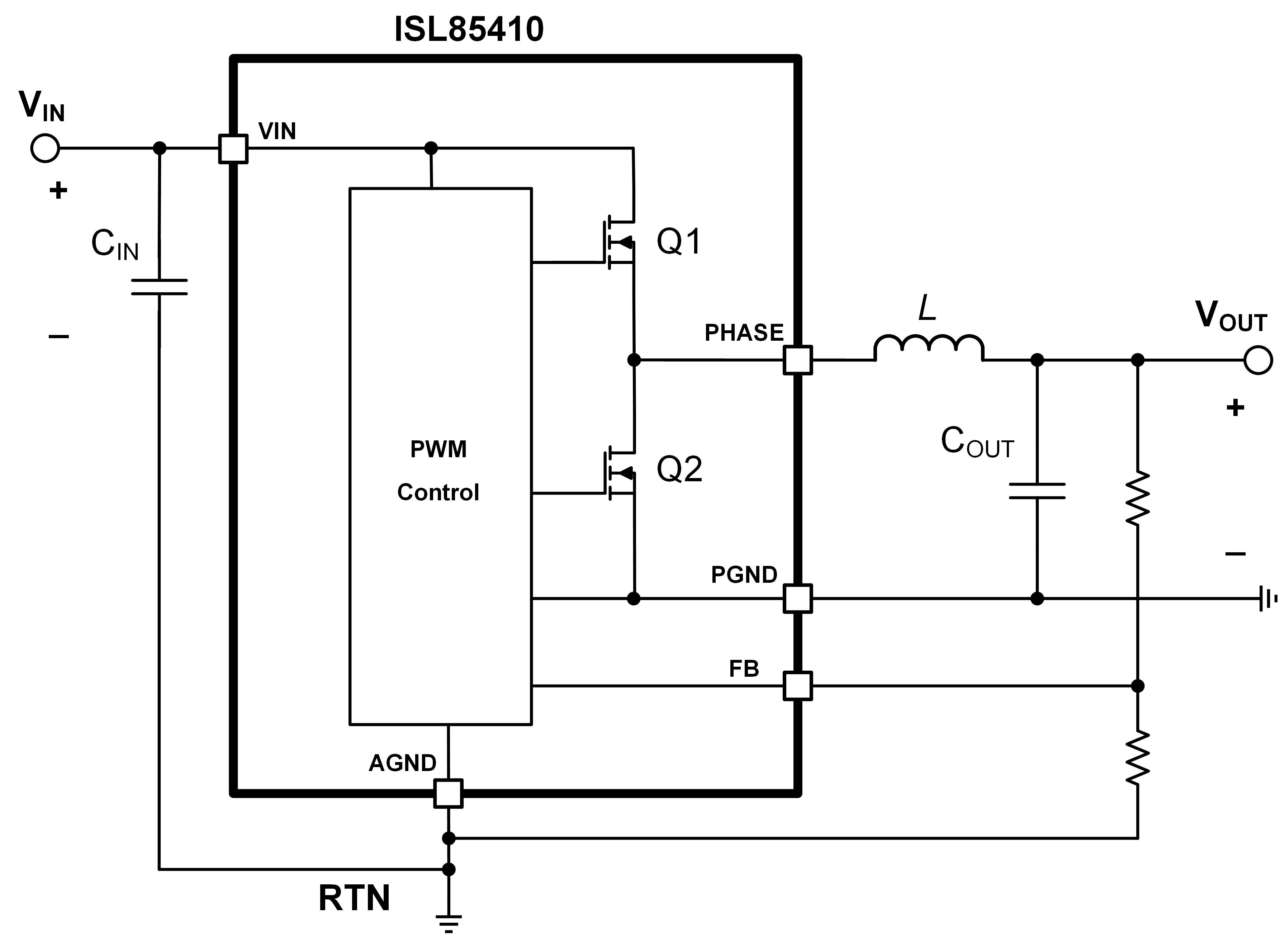
Dove D è il duty cycle e varia da 0 a 1, il che indica che la tensione di uscita (VOUT) è sempre inferiore o uguale alla tensione in ingresso (VIN).
Alimentatore Invertente con un Regolatore Buck
Mentre le tensioni positive sono comunemente usate e disponibili nei sistemi elettronici, a volte sono richieste anche tensioni negative. In tali casi, sarà necessario un alimentatore invertente per generare una tensione negativa partendo da un ingresso positivo. Il convertitore buck-boost invertente è una delle soluzioni più diffuse per soddisfare queste esigenze applicative.
La Figura 2 confronta lo stadio di potenza di un convertitore buck con un convertitore buck-boost invertente, a dimostrazione del fatto che un convertitore buck-boost invertente può essere derivato dalla commutazione del FET Q2 e dell'induttore L1. Questa modifica della topologia comporta un diverso rapporto di conversione della tensione e la polarità invertita della tensione di uscita:
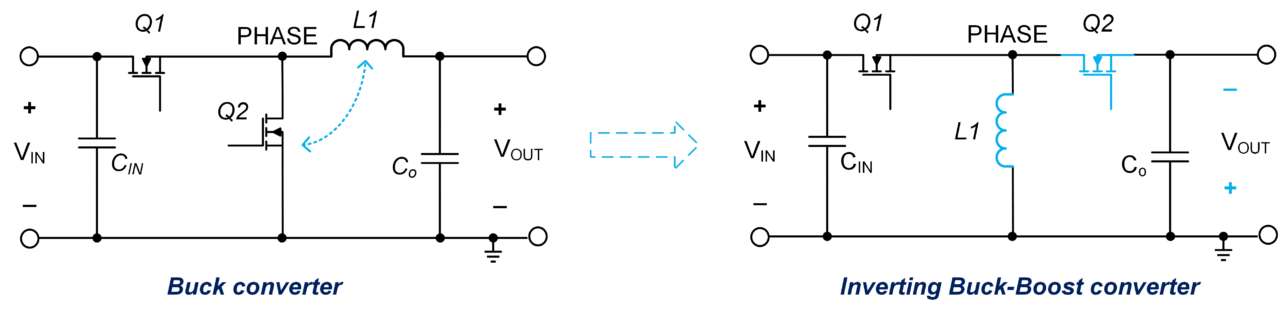
In un convertitore buck-boost invertente, l'ampiezza della tensione di uscita può essere sia superiore che inferiore alla tensione di ingresso e la tensione di uscita è negativa rispetto alla massa della tensione in ingresso.
Il convertitore buck-boost invertente può essere realizzato con un regolatore buck ad alta integrazione. La Figura 3 mostra un esempio semplificato che utilizza il regolatore buck ISL85410. Quando si configura un regolatore buck come convertitore buck-boost invertente, i progettisti analogici devono prestare attenzione a due principali differenze. La prima differenza è la connessione del ritorno (RTN) della tensione in ingresso (VIN). Nel convertitore buck mostrato in Figura 1, il RTN della tensione in ingresso è anche la massa del dispositivo (cioè i pin AGND/PGND del regolatore buck), mentre il RTN della tensione in ingresso e il ground del dispositivo non sono più lo stesso segnale in un convertitore buck-boost invertente. Quindi, quando si realizza un convertitore buck-boost invertente, la tensione in ingresso deve essere applicata attraverso il pin VIN e RTN invece dei pin AGND/PGND.

La seconda differenza è lo stress della tensione sul pin VIN riferita al pin AGND. Questa tensione in un convertitore buck è sempre uguale alla tensione di ingresso (VIN) indipendentemente dalla tensione di uscita. Al contrario, il pin VIN in un convertitore buck-boost invertente deve poter sopportare la somma della tensione di ingresso e della tensione di uscita (VIN+VOUT). Ad esempio, in un progetto che converte da 24 V a -5 V, la tensione sul pin VIN è 29 V anziché 24 V. Tenere presente che lo stress di tensione sul pin VIN non deve mai superare la tensione massima assoluta specificata nel datasheet del circuito integrato.
Alimentatore Duale con un Regolatore Buck
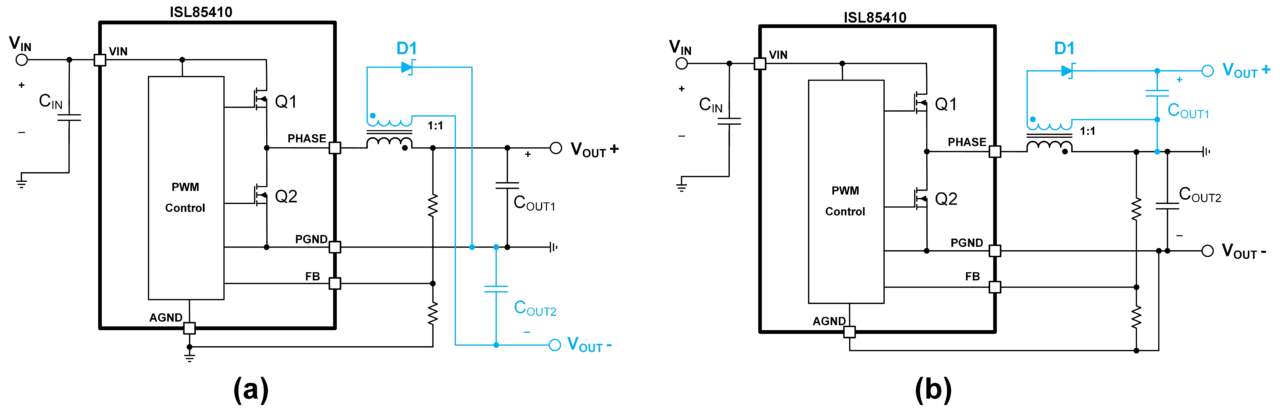
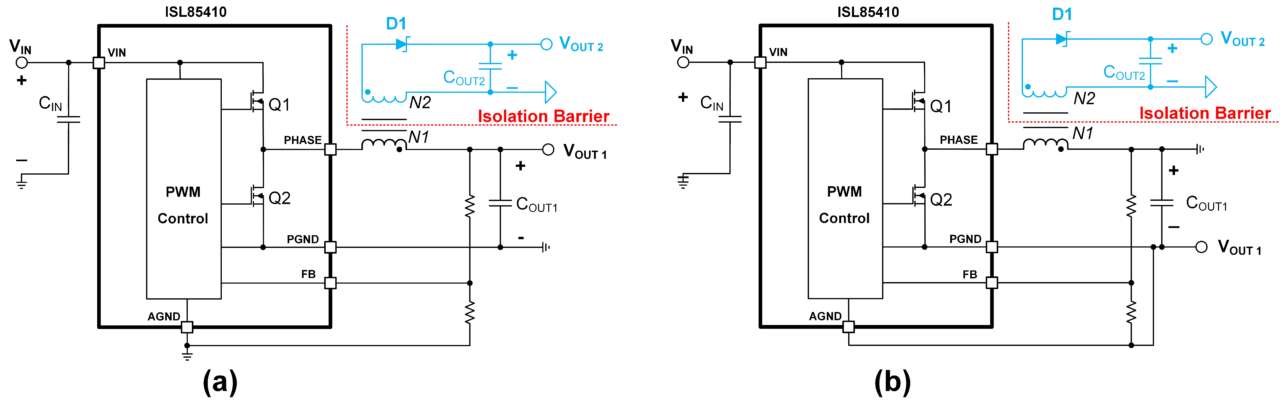
Molte applicazioni, inclusi amplificatori operazionali e sistemi di acquisizione dati, richiedono una doppia alimentazione di ±5 V o ±12 V. Un metodo popolare è quello di utilizzare un singolo regolatore switching insieme a un induttore accoppiato (chiamato anche comunemente trasformatore) per generare una tensione negativa e una tensione positiva. La Figura 4 mostra come è possibile utilizzare un convertitore buck e un convertitore buck-boost invertente per creare alimentatori bipolari.
Come mostrato nella Figura 4(a), il regolatore buck ISL85410 viene dapprima configurato come un regolatore buck che regola l'uscita positiva VOUT+, e quindi l'uscita negativa VOUT- viene generata aggiungendo un ulteriore avvolgimento accoppiato. L'uscita positiva VOUT+ è regolata come in un convertitore buck, mentre l'uscita negativa VOUT- riflette VOUT+ (per semplicità, la caduta di tensione diretta del diodo raddrizzatore D1 viene trascurata) ma con polarità opposta.
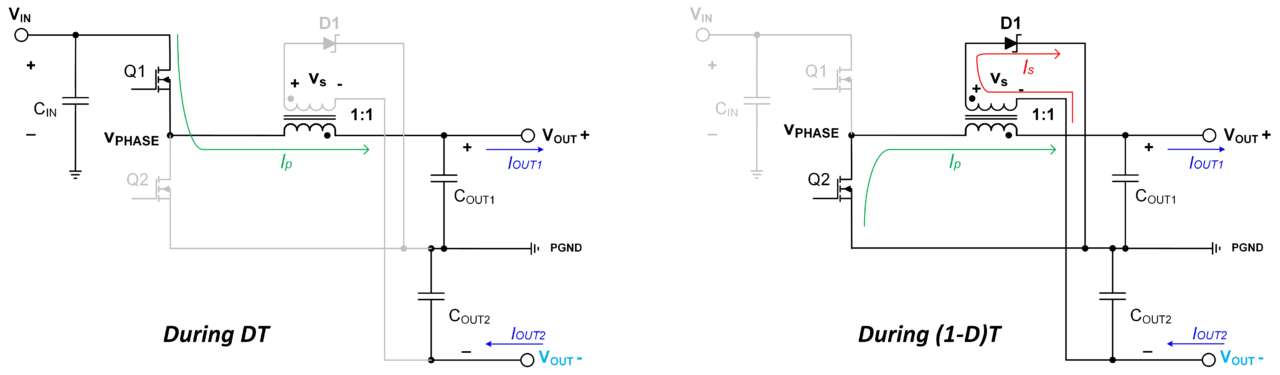
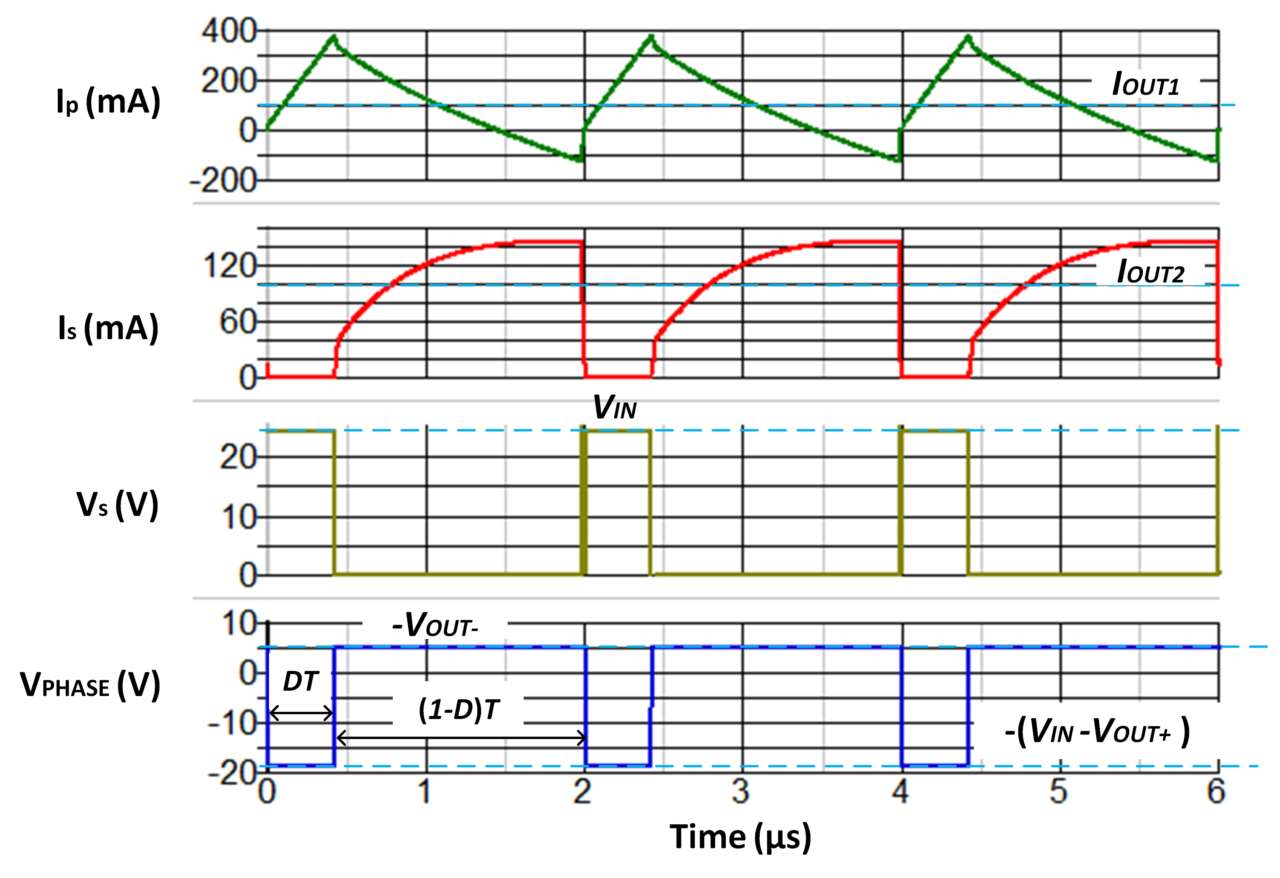
La figura 5 mostra il circuito equivalente di un alimentatore duale usando il metodo buck durante gli intervalli di tempo di DT e (1-D)T. Durante DT, il FET Q1 è acceso, con il diodo raddrizzatore D1 polarizzato inversamente, e quindi non abbiamo passaggio di corrente nell'avvolgimento secondario. Durante (1-D)T, Q1 è disattivato e la corrente Ip circola attraverso il FET Q2. La tensione attraverso l'avvolgimento secondario (Vs) riflette VOUT+, e di conseguenza D1 si accende per caricare il condensatore di uscita COUT2 e fornire energia al carico. Si consiglia vivamente di configurare il convertitore in CCM forzato per ottenere una buona regolazione della tensione per la tensione di uscita negativa (VOUT-).
Un modello SIMPLIS di un alimentatore duale, utilizzando l'ISL85410, è stato costruito e simulato per elaborare il suo principio di funzionamento. I parametri chiave sono elencati nella Tabella 1.
| VIN | VOUT+ | VOUT- | I OUT 1 | I OUT 2 | f sw |
|---|---|---|---|---|---|
| 24V | 5V | -5V | 100 mA | 100 mA | 500 kHz |
Tabella 1. Parametri chiave di un Alimentatore Duale
Le forme d'onda simulate sono mostrate in Figura 6. Durante (1-D)T quando Q2 è acceso, la corrente riflessa della corrente dell’avvolgimento secondario (Is) fa diventare negativa la corrente primaria totale (Ip). Attraverso una corretta progettazione, questa corrente negativa deve essere mantenuta sufficientemente bassa da evitare l'attivazione del limite di corrente negativo del regolatore buck in condizioni operative normali.
La Figura 4 (b) mostra un altro approccio, che utilizza il metodo buck-boost invertente per generare un alimentatore duale. Contrariamente all'approccio che utilizza il metodo buck, il metodo buck-boost invertente configura il regolatore buck in un'inversione buck-boost per creare una tensione negativa, mentre una tensione positiva viene generata utilizzando un avvolgimento accoppiato. A differenza dell'alimentatore duale che utilizza il metodo buck, il metodo buck-boost invertente può regolare l'uscita partendo da una tensione in ingresso inferiore all'uscita (conversione step-up). Tuttavia, la tensione vista dai FET nel metodo buck-boost inverso è superiore al metodo buck.
Alimentatore Isolato con un Regolatore Buck
Alle tensioni d’uscita isolate spesso viene richiesto di fornire isolamento galvanico, migliorare la sicurezza e migliorare l'immunità ai disturbi. Esempi di applicazioni comuni includono programmable logic controllers (PLC), misurazione intelligente dell'energia e alimentatori per driver IGBT. I convertitori flyback e push-pull sono due soluzioni popolari ed economiche. Tuttavia, il convertitore flyback solitamente richiede un optoaccoppiatore o un avvolgimento ausiliario per regolare la tensione di uscita. Inoltre, la commutazione nel flyback introduce picchi di alta tensione e quindi è comunemente richiesto uno snubber RCD. Il trasformatore DC push-pull che funziona con un duty cycle fisso del 50% esegue una cattiva regolazione della tensione di uscita o necessita di un LDO aggiuntivo per una regolazione precisa dell'uscita.
Nella già menzionata alimentazione duale (Figura 4), la tensione di uscita aggiuntiva viene ottenuta aggiungendo un avvolgimento magneticamente accoppiato all'induttore in un convertitore buck o buck-boost invertente. Semplicemente isolando i ritorni di queste due uscite, si ottiene una uscita di tensione isolata (vedere la Figura 7). Questo approccio è diventato di recente molto popolare.
Alimentatore isolato con singola tensione isolata
I due approcci per la generazione di una tensione isolata che utilizza un regolatore buck sono mostrati in Figura 7. Queste configurazioni sono simili all'alimentazione duale descritta nella Figura 4 eccetto che i ritorni (riferimenti) delle due uscite sono separati. A differenza di un alimentatore duale in cui il rapporto di trasformazione del trasformatore è 1:1, il rapporto degli avvolgimenti di un alimentatore isolato può essere ottimizzato per impostare la tensione di uscita desiderata sul lato secondario. Inoltre, può essere regolato per far funzionare il controller con un ciclo di lavoro ottimale.
Un alimentatore isolato con un regolatore buck offre diversi vantaggi. Il metodo buck mostrato nella Figura 7(a) è ampiamente adottato e verrà usato come esempio per spiegare i suoi benefici. Innanzitutto, elimina il fotoaccoppiatore o l'avvolgimento terziario richiesto in un convertitore flyback. In secondo luogo, la configurazione buck sul lato primario fornisce una bassa tensione sui FET sul lato primario rispetto al convertitore flyback. FET con tensione inferiore portano ad una minore resistenza e maggiore efficienza. In terzo luogo, l'uscita lato primario (VOUT1) è ben regolata e l'uscita isolata (VOUT2) riflette VOUT1, fornendo una buona regolazione della tensione di uscita sul lato secondario su un ampio intervallo di tensione in ingresso. È possibile ottenere una migliore regolazione della tensione rispetto a un trasformatore DC push-pull senza LDO aggiuntivi. Chip con regolatore buck altamente integrati quale ISL85410 con compensazione interna rendono questi approcci facili da usare e attraenti per la progettazione di alimentatori.
I vantaggi e gli svantaggi della tabella 2 relativi all'utilizzo del metodo buck o di quello buck-boost invertente per la progettazione di alimentatori bipolari si applicano anche agli alimentatori isolati che utilizzano un regolatore buck. I progettisti analogici sono quindi in grado di selezionare l'approccio più adatto per le loro specifiche applicazioni.
Alimentatore isolato con multiple tensioni isolate
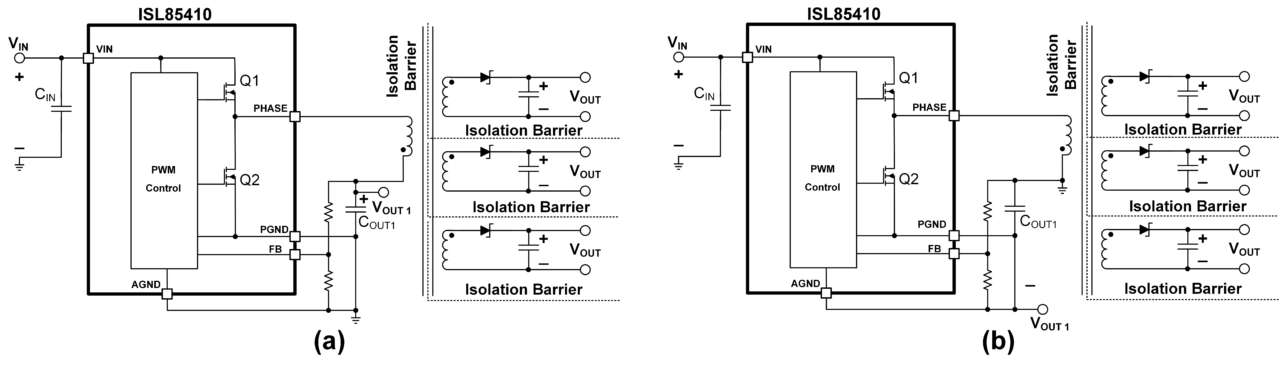
È possibile realizzare più uscite di tensione isolate aggiungendo più avvolgimenti accoppiati: due esempi sono illustrati nella Figura 8. Il principio di funzionamento è simile alla singola uscita isolata.







{kind=link}